

Robot working fault remote debugging teaching system
A remote debugging and teaching system technology, applied in the field of remote teaching, can solve problems such as sensor failures easily, and achieve the effect of enriching actual combat experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
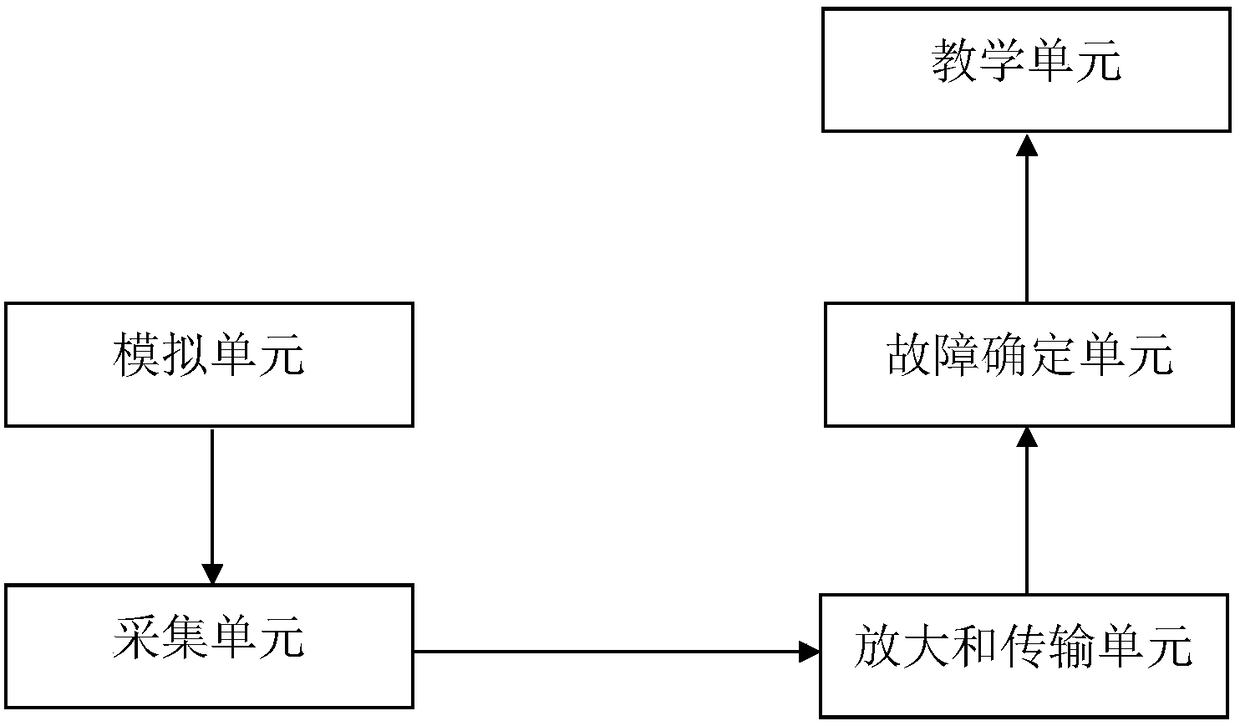
[0024] like figure 1 As shown, the robot working failure remote debugging teaching system of the present invention, the system includes:
[0025] The analog unit is used to generate simulated fault signals and transmit them to the sensors of industrial robots, for example, using numerical control motors to drive mechanical displacement or vibration;
[0026] The acquisition unit is used to collect the signal output by the sensor after the signal generated by the analog unit is transmitted to the sensor;
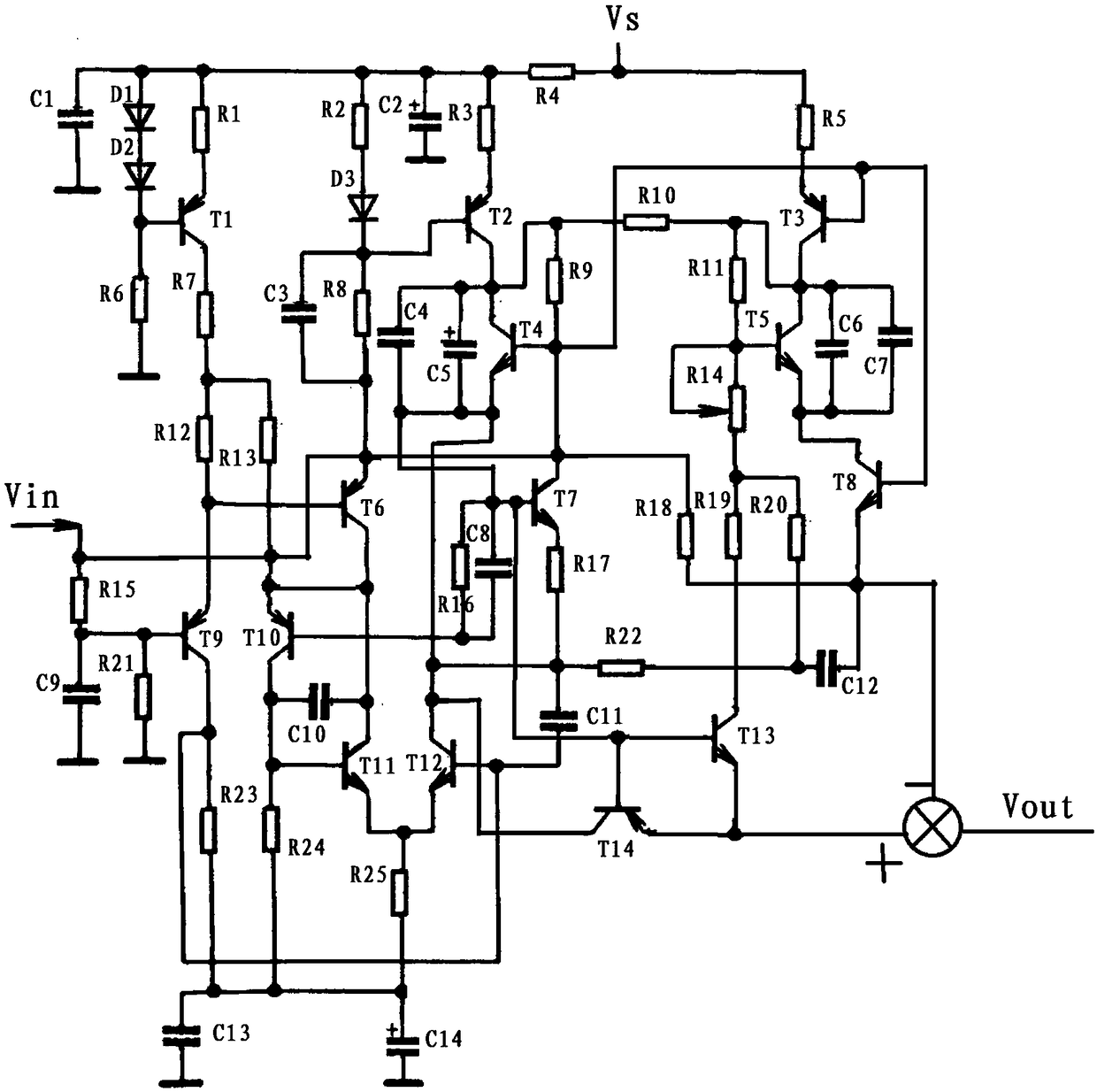
[0027]The amplification and transmission unit is used to amplify and transmit the signal collected by the collection unit. This unit includes an amplification sub-unit, which is used to amplify the signal collected by the collection unit. 4G communication technology is used for transmission;
[0028] A fault determination unit is used to determine the sensor fault of the industrial robot according to the amount of data transmitted by the amplification and transmission unit a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More