

Path planning method integrating dense convolution network and competitive architecture
A path planning and convolutional network technology, applied in two-dimensional position/course control, vehicle position/route/height control, non-electric variable control, etc., can solve the problem of overestimation of the action value of the DQN algorithm and insufficient fast training of the DQN network , can not meet the problems of high-speed path planning, etc., to achieve efficient path planning, meet high-speed path planning, and shorten the planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
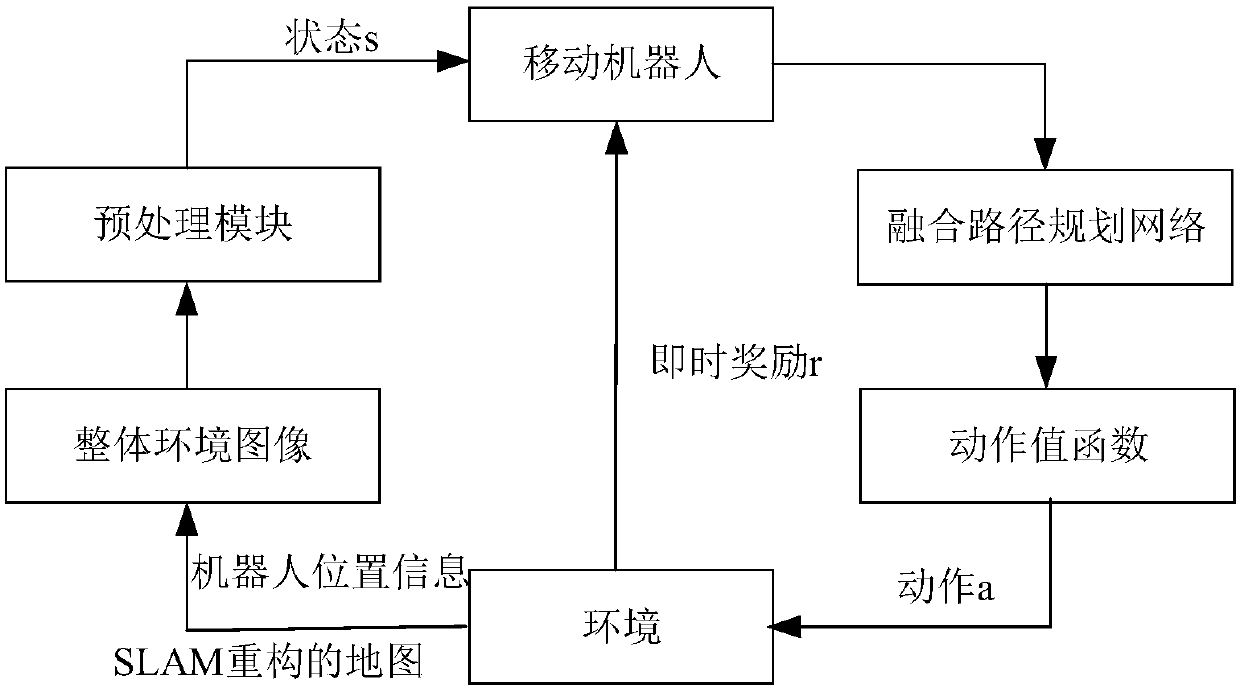
[0037] see figure 1 , an embodiment of the present invention is a path planning method that integrates a dense convolutional network and a competitive architecture, which includes the following steps:
[0038] Step S1: The mobile robot samples mini-batch conversion information (s, a, r, s′, d) from the experience playback memory, and selects one of the two fusion path planning networks as an online network according to preset rules, and the other Then as the target network; the fusion path planning network is formed by the fusion of den...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More