

A Target Point Allocation Method for Robot Formation
A distribution method and robot technology, applied in the field of robots, can solve the problems of not considering the selection of target points, the high precision required by sensors, and the low efficiency of formation formation, achieving strong practicability, avoiding collision with obstacles, and improving service life. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
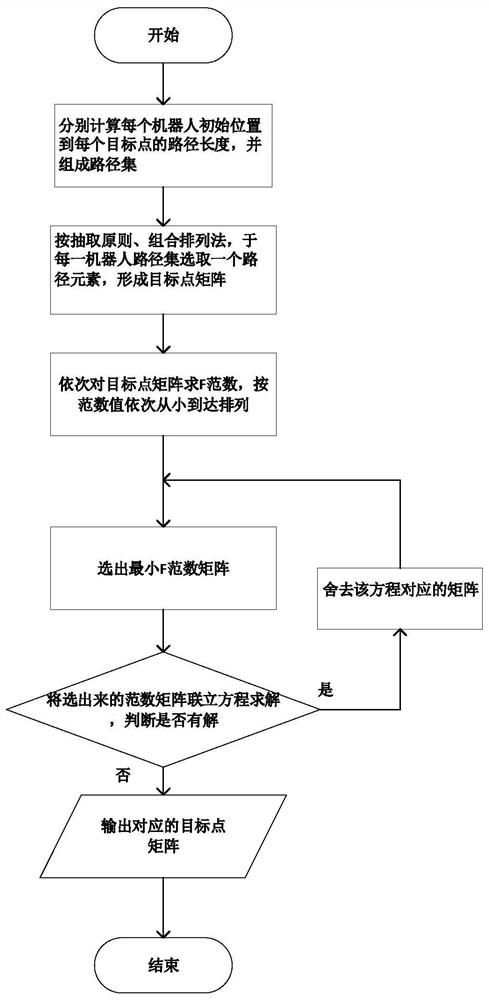
[0047] This embodiment provides a method for allocating target points in robot formation, which specifically includes the following steps:
[0048] Step 1) establish a plane coordinate system, calculate the path length set of each robot according to the position coordinates of each robot and the target point, the path length set of each robot is composed of the path lengths from each robot to all target points;
[0049] Step 1.1) Number the three robots according to 1, 2, 3, number the three target points according to 1, 2, 3, and establish a plane Cartesian coordinate system. The initial positions of the three robots are (0, 1, ), (1, 2), (1, 0), the coordinates of the three target points are (3, 2), (2.5, 1.5), (3.5, 1.5), and the coordinates of the two obstacles are (2, 2 ), (2, 1), the path of the robot to go around the obstacle is a semi-circular arc, and the radius of the semi-circular arc is r=2;
[0050] Step 1.2) Calculate the path length of each robot to reach each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More