

Robot picking implementation method and device, and electronic equipment
A realization method, robot technology, applied to instruments, manipulators, program-controlled manipulators, etc., can solve problems such as ineffective picking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
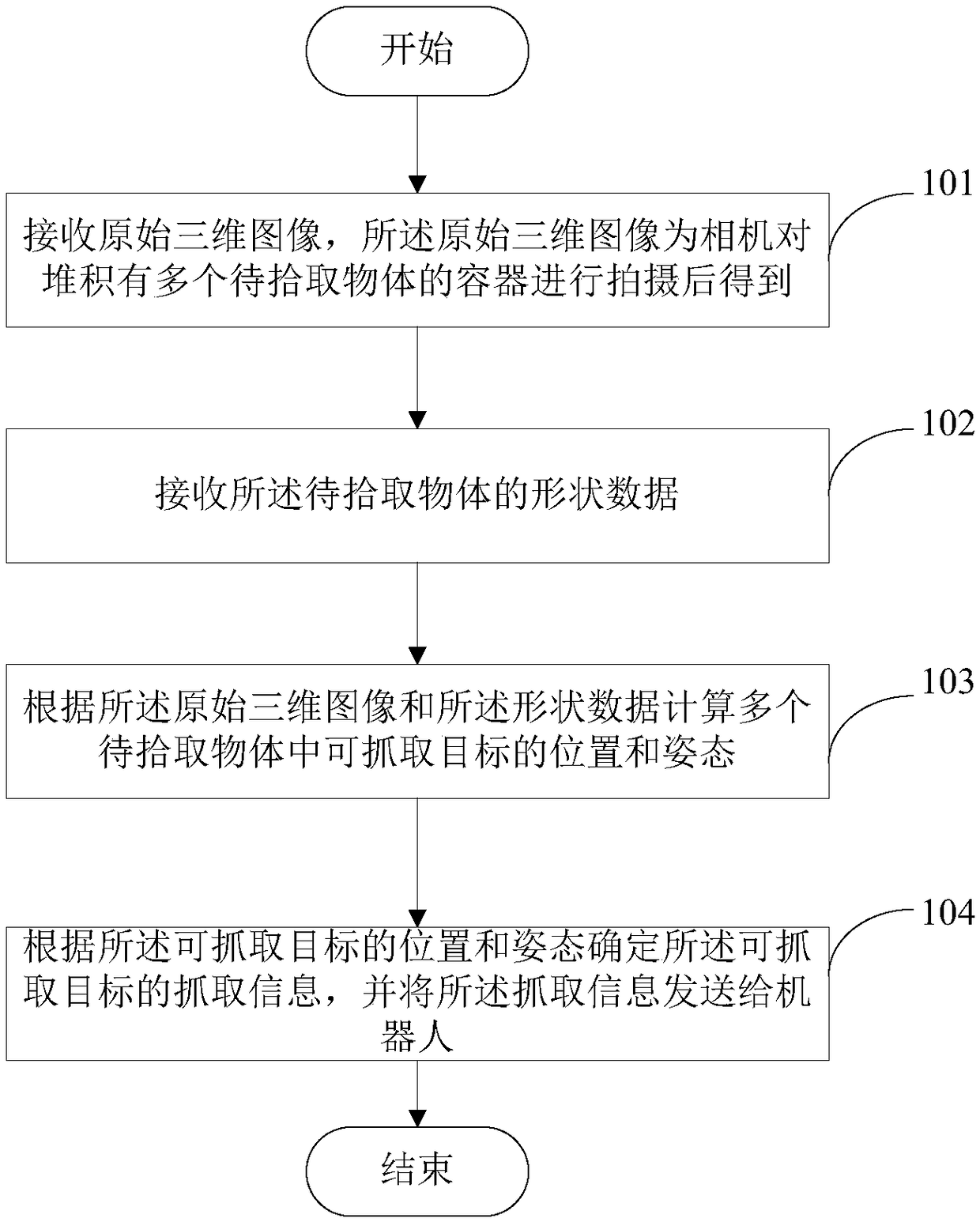
[0120] This embodiment provides a method for implementing robot picking, such as figure 1 Shown, including:
[0121] Step 101: Receive an original three-dimensional image, the original three-dimensional image obtained after a camera photographed a container with multiple objects to be picked up;
[0122] Step 102: Receive shape data of the object to be picked up;
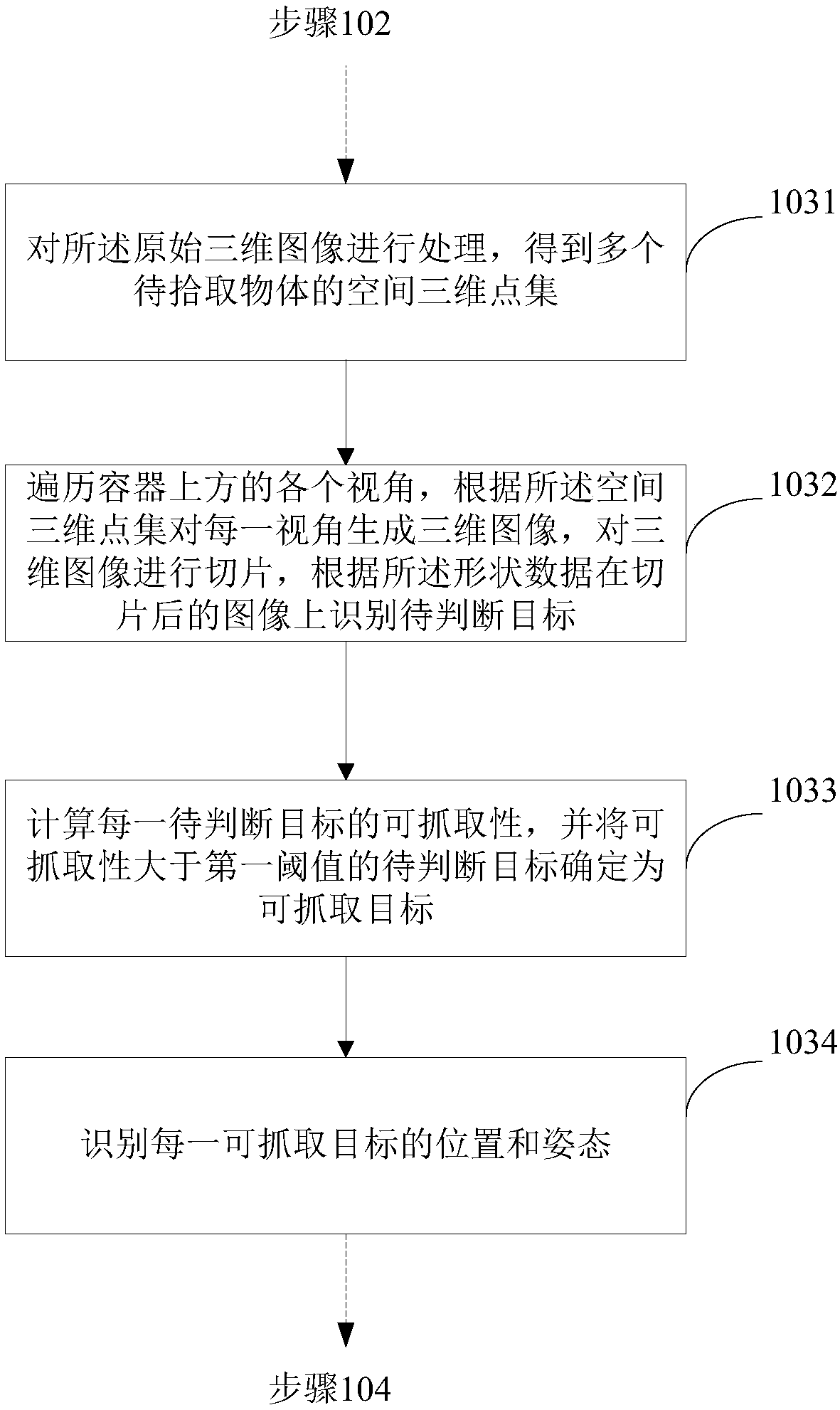
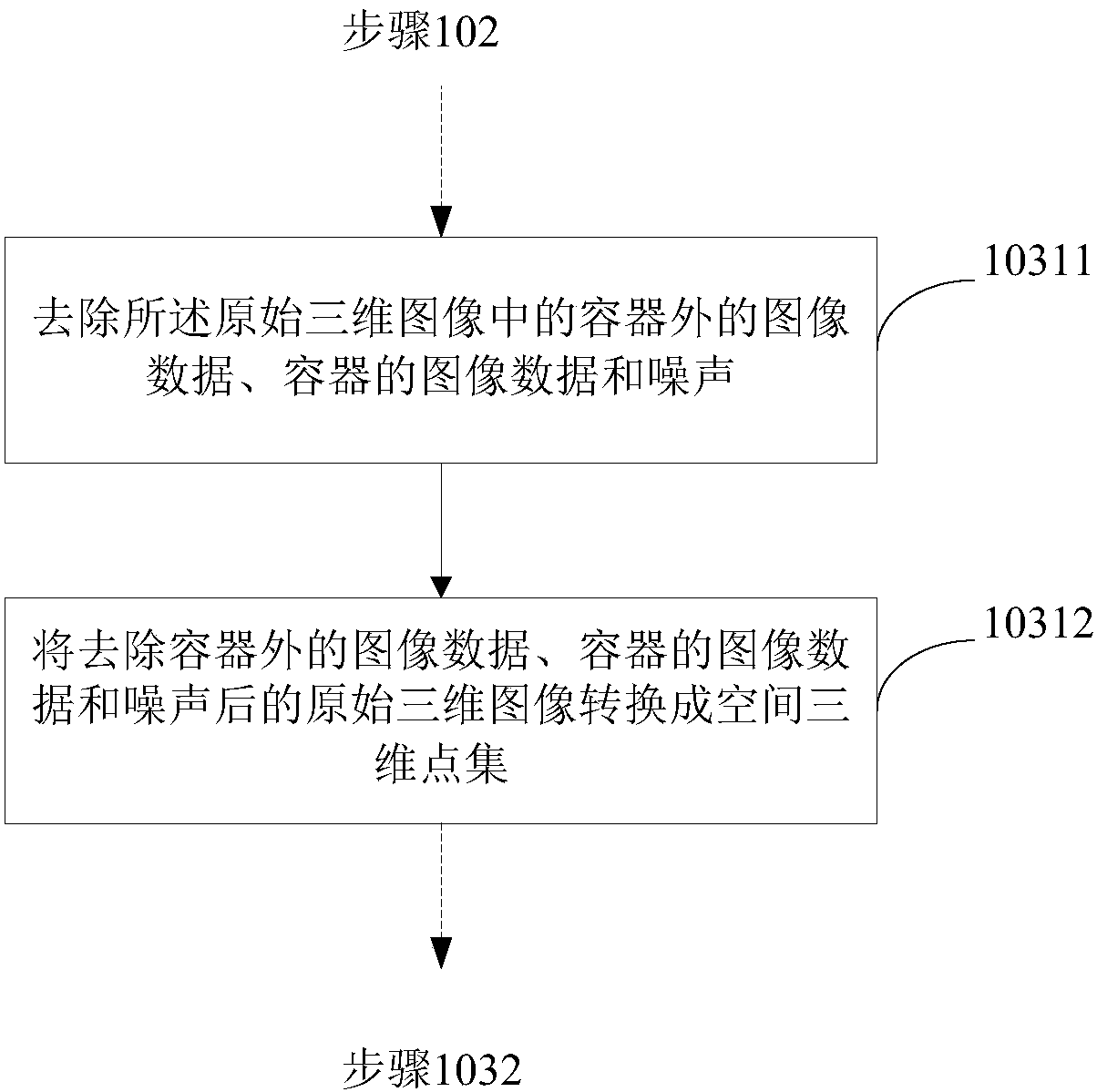
[0123] Step 103: Calculate the position and posture of the graspable target among multiple objects to be picked based on the original three-dimensional image and the shape data;
[0124] Step 104: Determine the grasping information of the graspable target according to the position and posture of the graspable target, and send the grasping information to the robot, so that the robot can pick up the graspable object according to the grasping information. Take the target.
[0125] This embodiment estimates the position and posture of the object to be picked up in a disorderly stacked scene through the acquired three-dimensional...
Embodiment 2
[0163] This embodiment provides a device 20 for implementing robot picking, such as Figure 8 As shown, this embodiment includes:
[0164] The first receiving module 21 is configured to receive an original three-dimensional image, the original three-dimensional image obtained after a camera photographed a container in which a plurality of objects to be picked up are stacked;
[0165] The second receiving module 22 is configured to receive the shape data of the object to be picked up;
[0166] The processing module 23 is configured to calculate the position and posture of the graspable target among multiple objects to be picked based on the original three-dimensional image and the shape data;
[0167] The grabbing information calculation module 24 is used to determine the grabbing information of the grabbing target according to the position and posture of the grabbing target, and sending the grabbing information to the robot so that the robot can follow the Grabbing information pickup ...
Embodiment 3
[0205] This embodiment provides an electronic device 30 that realizes robot picking, such as Figure 15 As shown, this embodiment includes:
[0206] Processor 32; and
[0207] The memory 34, in which computer program instructions are stored,
[0208] Wherein, when the computer program instructions are executed by the processor, the processor 32 is caused to perform the following steps:
[0209] Receiving an original three-dimensional image, the original three-dimensional image obtained after a camera photographed a container with a plurality of objects to be picked up;
[0210] Receiving the shape data of the object to be picked up;
[0211] Calculating the position and posture of a graspable target among multiple objects to be picked up according to the original three-dimensional image and the shape data;
[0212] The grasping information of the graspable target is determined according to the position and posture of the graspable target, and the grasping information is sent to a robot, s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More