

Mixed path planning method and system based on grid map
A grid map and mixed path technology, applied in the field of robot navigation, can solve the problems of high probability of mobile robot colliding with obstacles, slow implementation speed, no consideration of idle node traffic costs, etc., and achieve the effect of short algorithm processing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the objectives, technical solutions and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not conflict with each other.
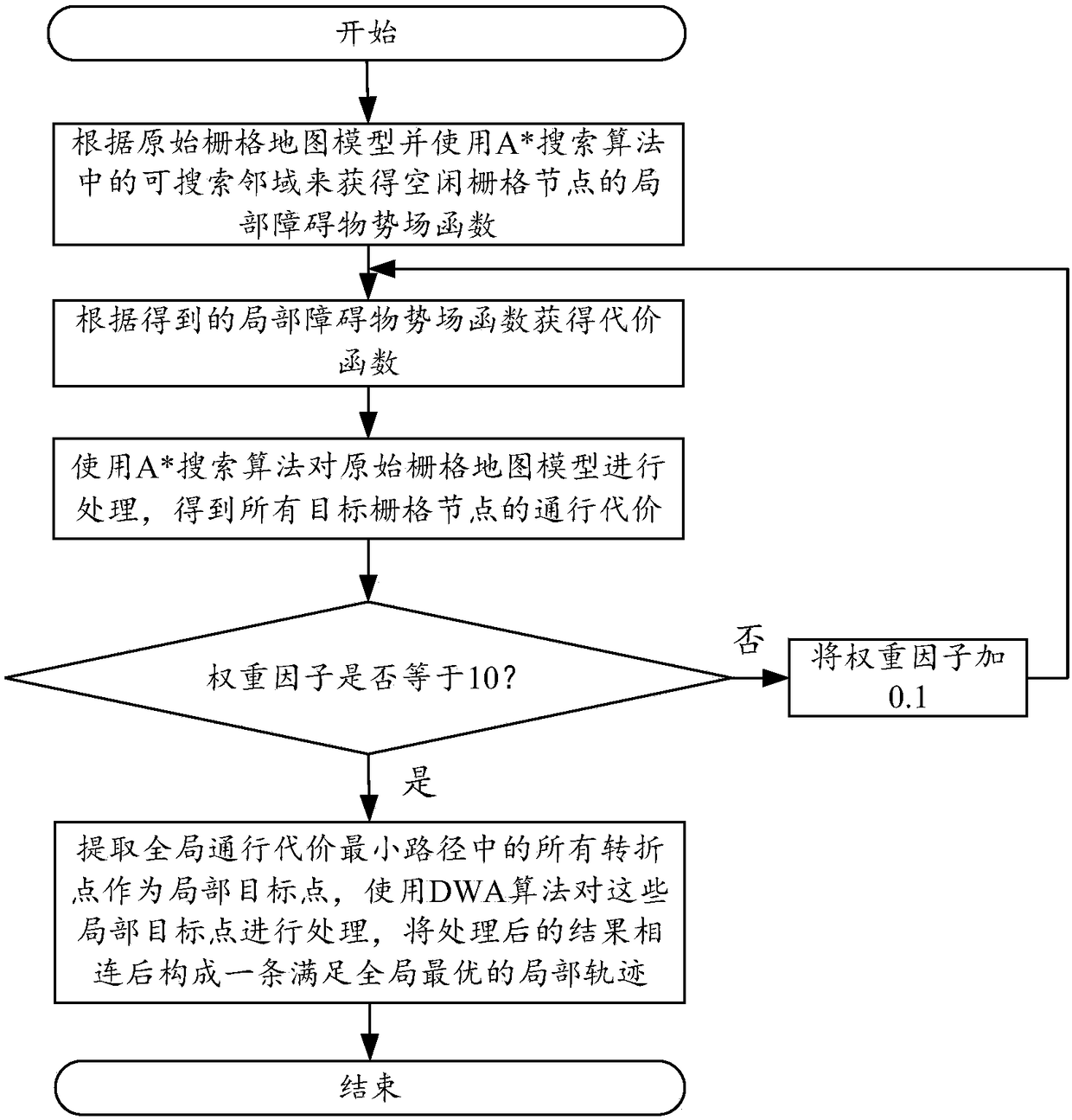
[0042] The present invention proposes a hybrid path planning method based on a grid map, which uses the idea of the local potential field method to perform local obstacle potential field calculations on the path nodes in the A* algorithm to obtain a global path with a higher security level for the mobile robot , And then detect the collision of local obstacles, modify the local path, and finally get ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More