

Robot hand eye calibration method and device based on standard ball
A technology of a robot hand and a calibration method, which is applied in the field of robot calibration, can solve the problems of reduced calibration accuracy and large calibration workload, and achieves the effects of improving compactness, small workload and high practical value.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The principles and features of the present invention are described below in conjunction with examples, which are only used to explain the present invention and are not intended to limit the scope of the present invention.
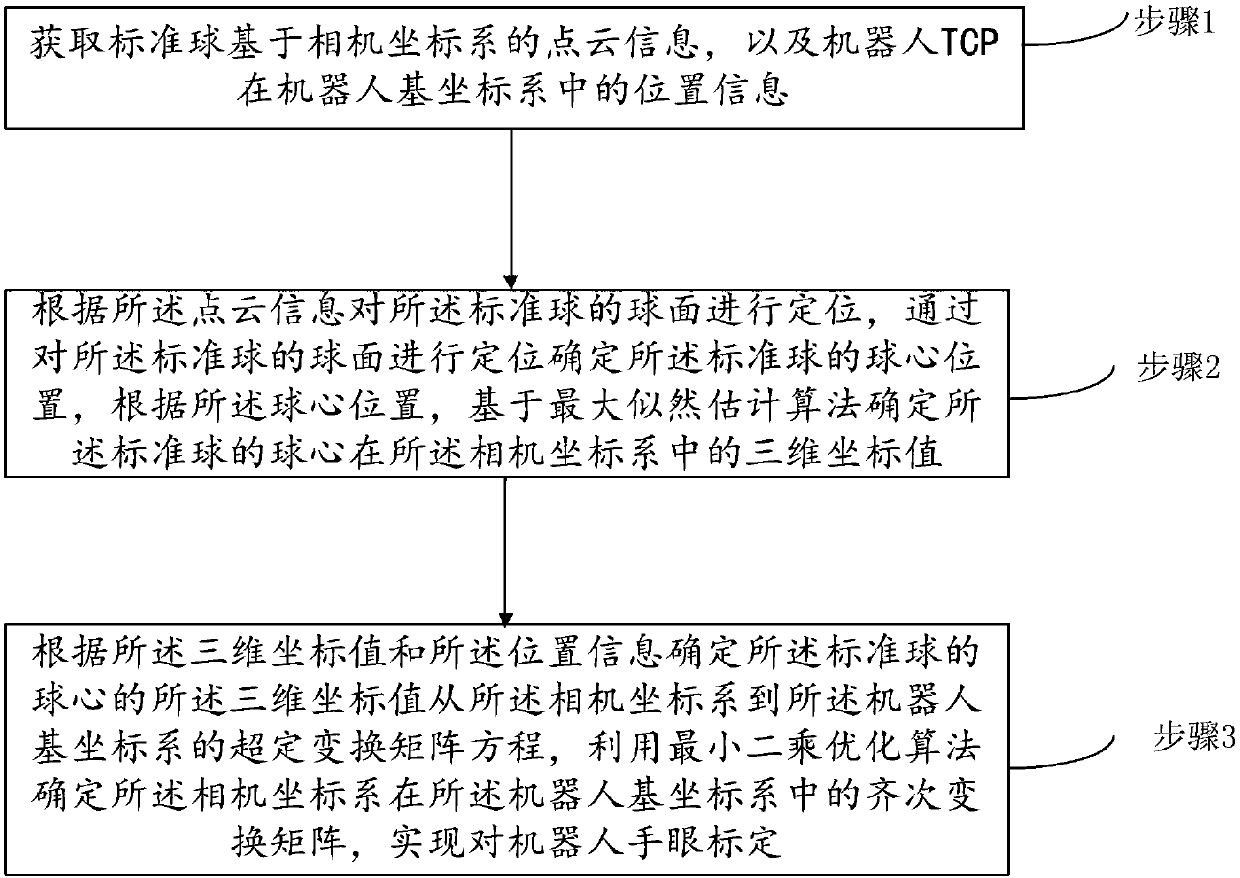
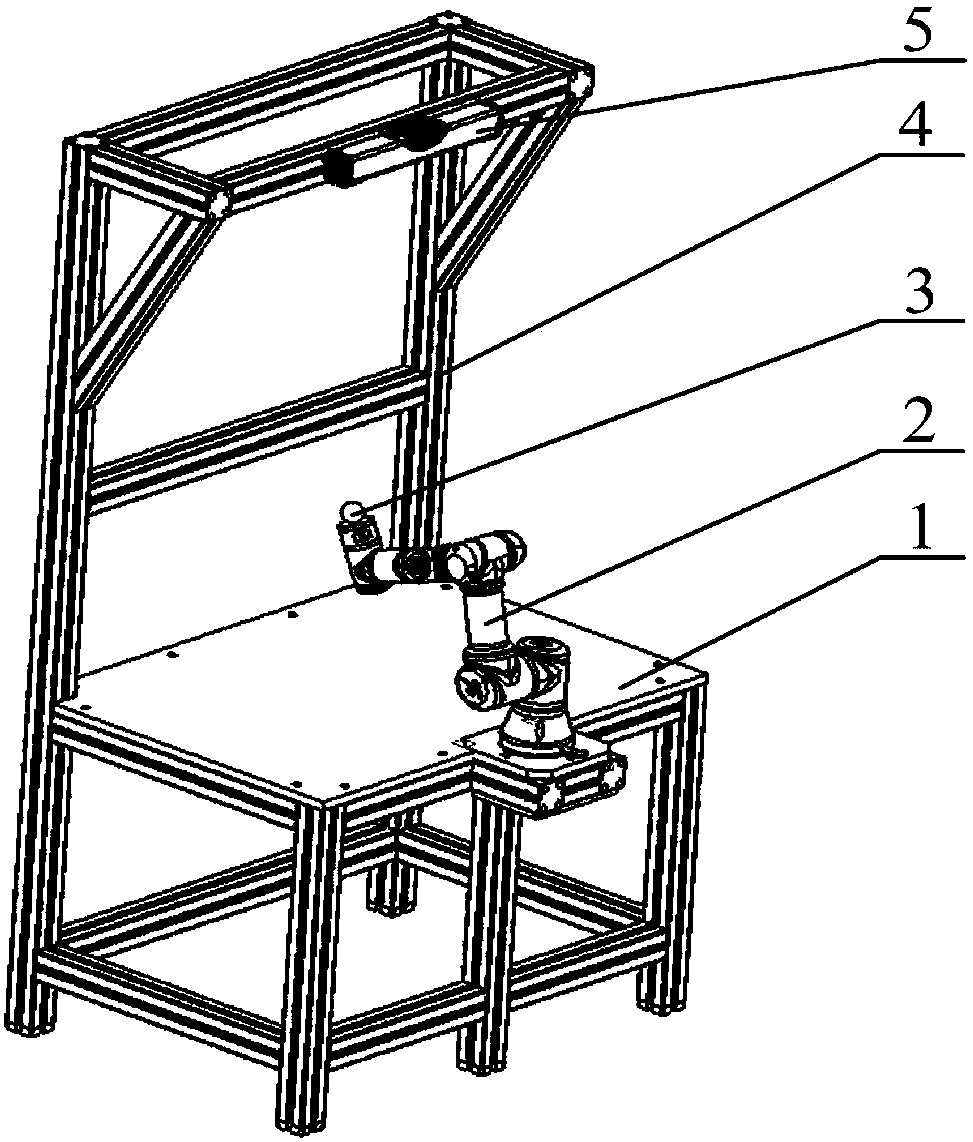
[0021] Such as figure 1 As shown, a standard ball-based robot hand-eye calibration method provided by an embodiment of the present invention includes the following steps:
[0022] Step 1, obtain the point cloud information of the standard sphere based on the camera coordinate system, and the position information of the robot TCP in the robot base coordinate system.
[0023] Step 2: Positioning the spherical surface of the standard sphere according to the point cloud information, determining the center position of the standard sphere by locating the spherical surface of the standard sphere, according to the center position, based on the maximum likelihood The estimation algorithm determines the three-dimensional coordinate value of the center of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More