

Front wheel steering chassis of security robot
A front wheel steering and robot technology, which is applied to steering mechanisms, steering rods, motor vehicles, etc., can solve the problems of unstable camera images, no shock absorption system, and large vibration of electrical controls, so as to avoid excessive tire wear and shooting. The screen is stable and the vibration effect is small
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
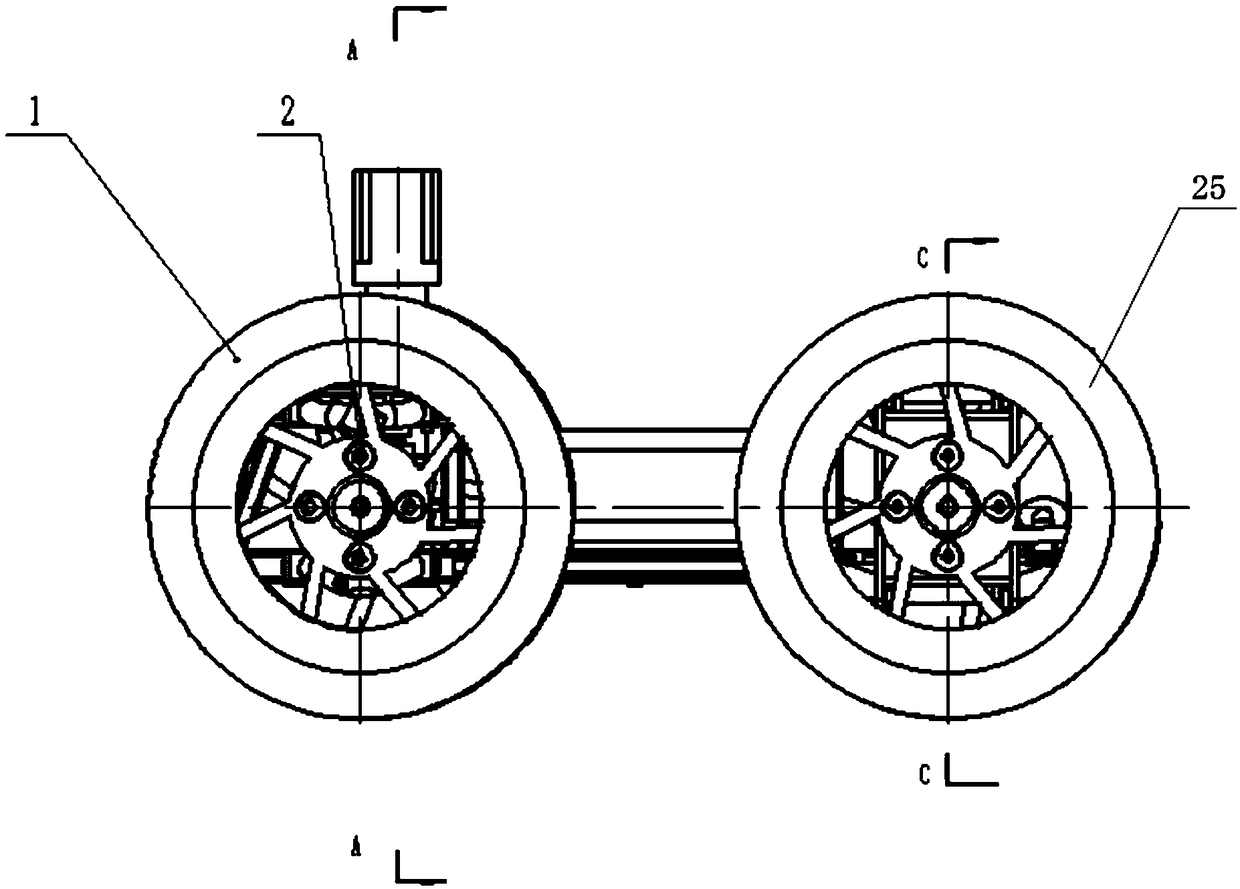
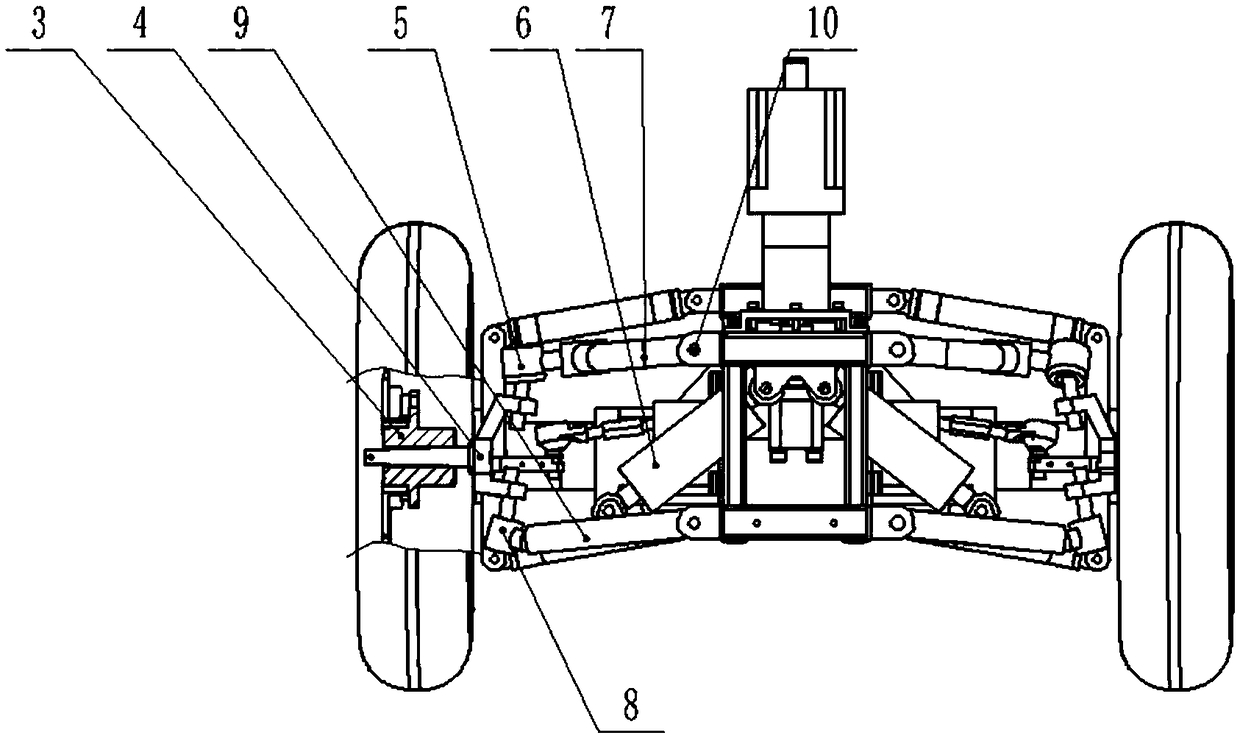
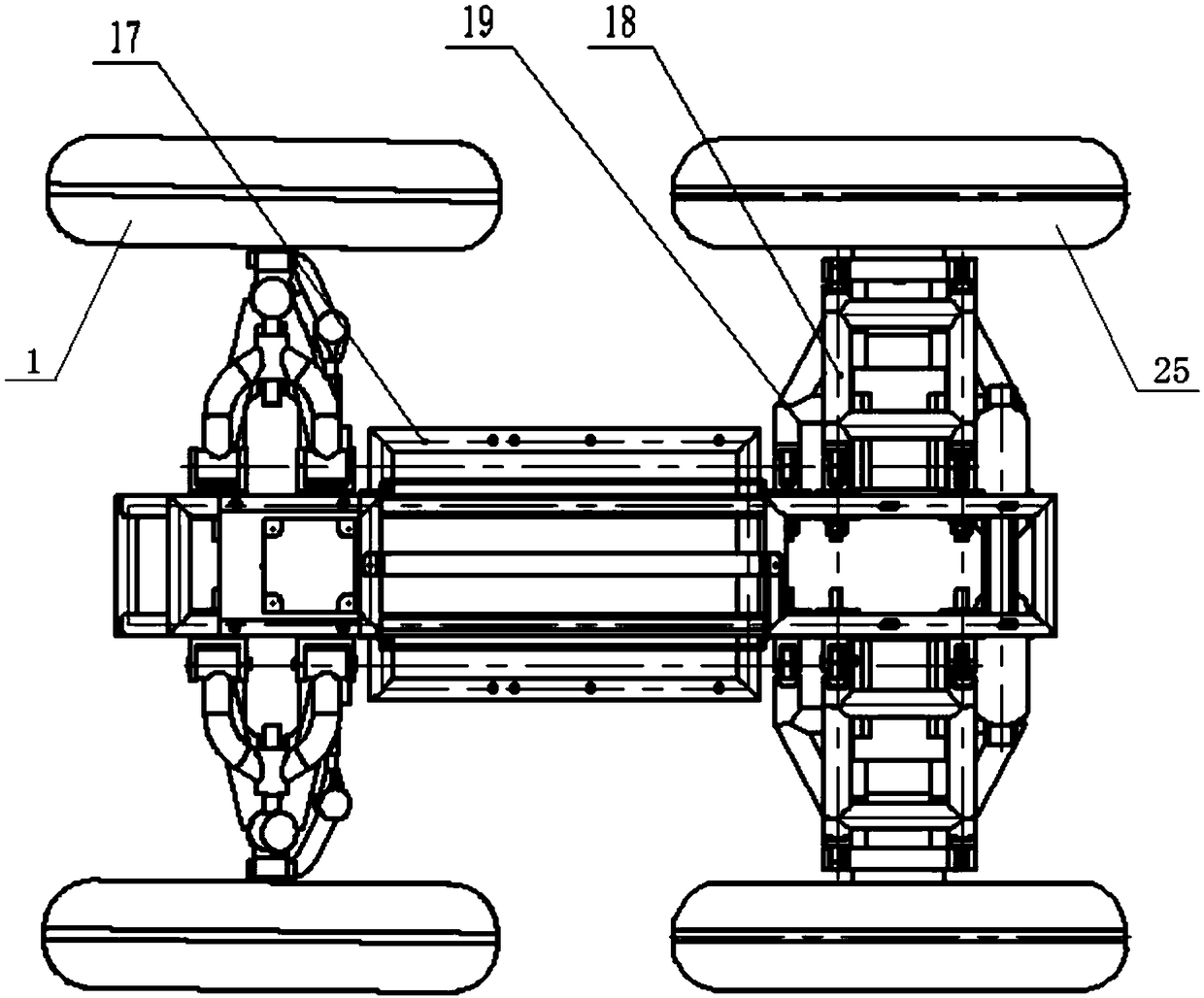
[0024] The invention provides a front wheel steering chassis of a security robot. The steering chassis adopts this structure to make all the wheels roll purely when turning, reducing the steering force, thereby reducing the power of the motor; and a shock absorbing mechanism is provided to enable the robot to overcome obstacles When the car body is stable, the vibration is small.
[0025] Such as Figure 1-3 As shown, the steering chassis includes a vehicle frame 17, a front wheel assembly, a rear wheel assembly and a steering mechanism. Wherein the vehicle frame 17 is positioned between the front wheel assembly and the rear wheel assembly, the front wheel assembly and the rear wheel assembly are respectively supported on the front end and the rear end of the vehicle frame 17, and the steering mechanism is installed on the lower surface of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More