Fusion estimation algorithm of selectively measured data of multiple sensors
A measurement data, multi-sensor technology, applied in the field of multi-sensor selective measurement data fusion estimation algorithm, can solve problems such as reducing the data transmission volume of nodes, and achieve good tracking estimation effect, low data transmission volume, and good tracking effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
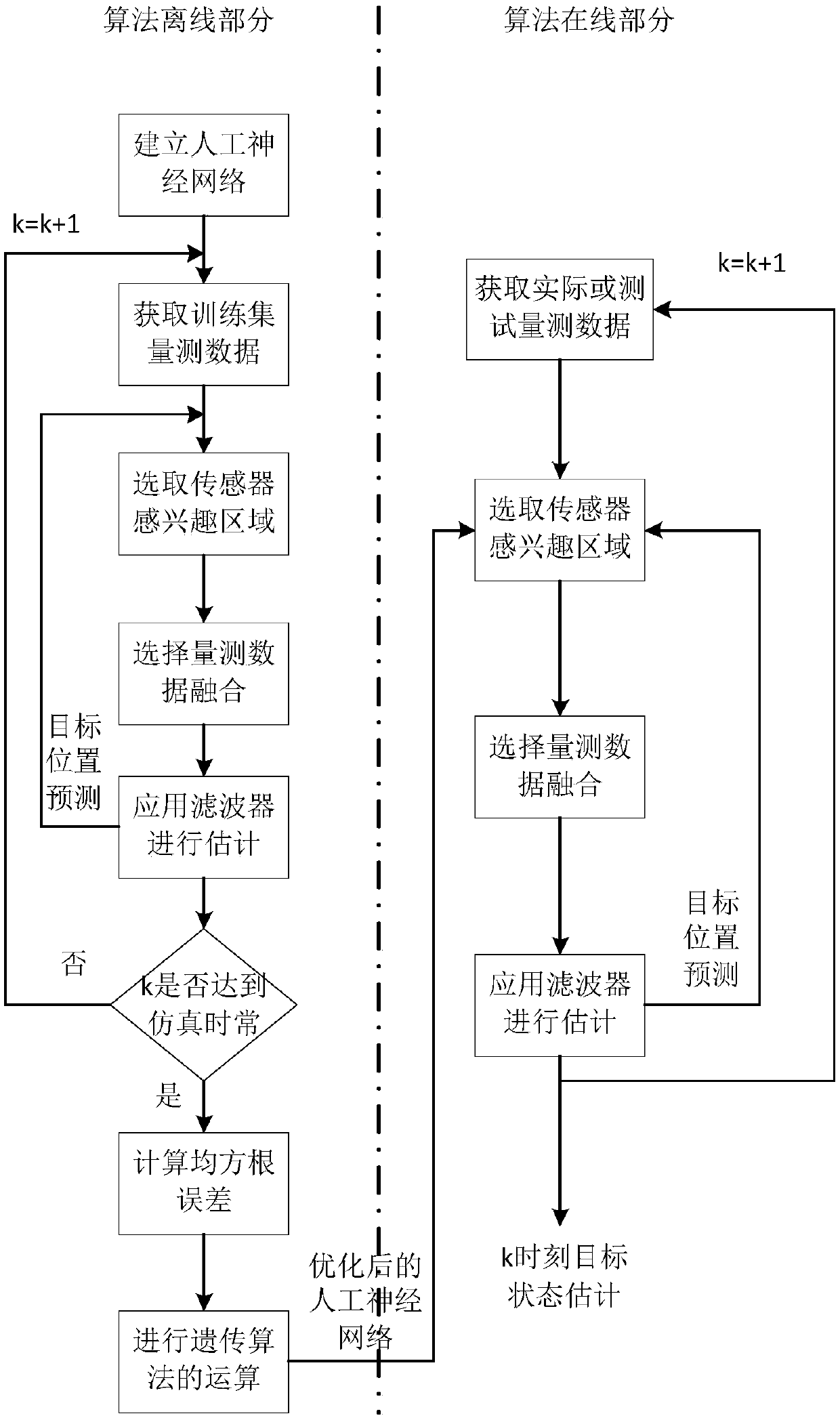
[0028] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings, and specific operation modes and implementation steps will be given. The present invention can also be realized through other different specific examples.
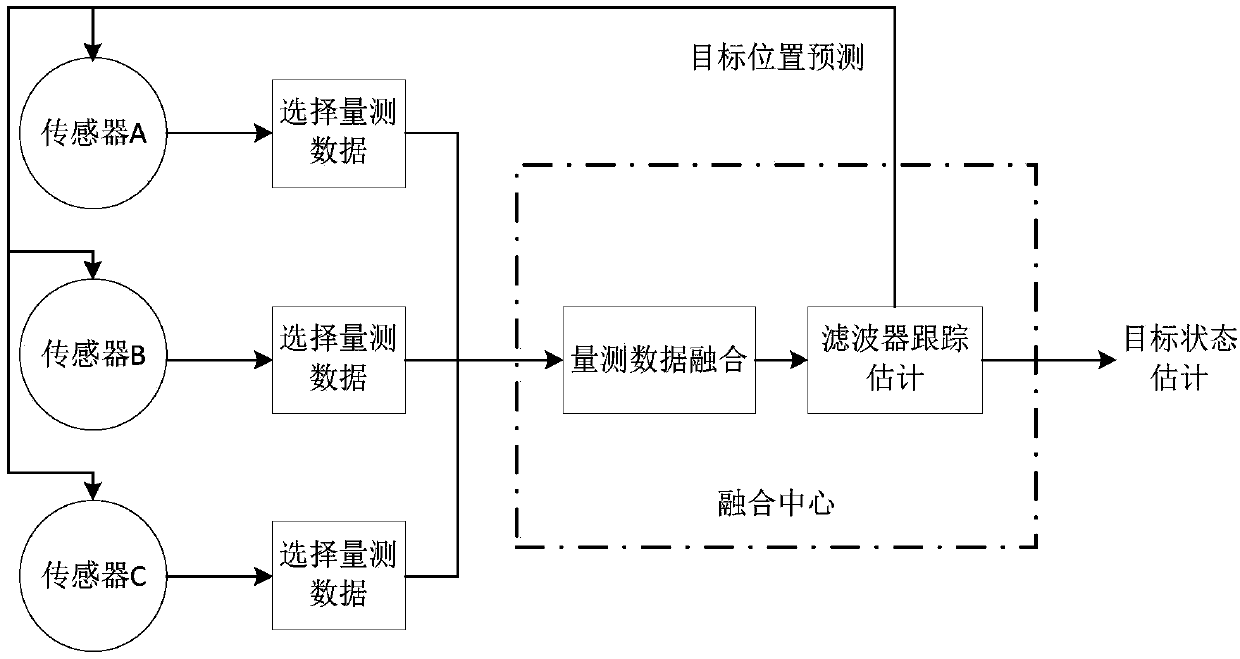
[0029] The examples here adopt computer simulation to generate training data and test data, which are respectively applied to the offline algorithm and the online algorithm of the algorithm of the present invention. Here it is assumed that there are n homogeneous sensors with the same observation field and registration has been completed, and each sensor obtains n x ×m y The image information Z k . It is assumed that the measurement information comes from two parts: the target signal and the measurement noise. Generate the motion state of the target at each moment through computer simulation, and then generate the measurement data Z of each sensor according to the actual state of the target...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com