

Unmanned boat target tracking method based on visual feedback
A target tracking and visual feedback technology, applied in the field of unmanned boat navigation, can solve the problems of poor anti-disturbance ability, low calculation accuracy and slow response speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0022] Specific embodiment one: a kind of unmanned ship target tracking method based on visual feedback comprises the following steps:
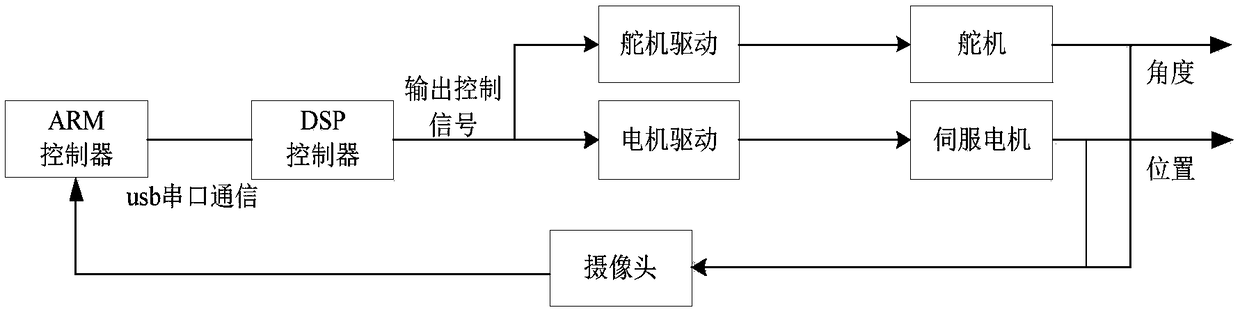
[0023] Such as figure 1 As shown, a kind of unmanned ship target tracking system based on visual feedback of the present invention uses the camera installed in front of the unmanned ship as a feedback element to feed back the captured real-time target image to the processor on the unmanned ship. Image processing, tracking the target and calculating the real-time position of the target. The processor calculates the deviation between the target position and its own position, and realizes the target tracking task through the motion control unit.
[0024] Step 1: Use the KCF (Kernel Correlation Filter) tracking algorithm to detect and track the tracking target, and determine the position coordinates of the tracking target;
[0025] Step 2: Establish the corresponding relationship between the pixel coordinate system and the tracking target in th...
specific Embodiment approach 2
[0028] Specific embodiment two: the difference between this embodiment and specific embodiment one is that in the step one, the tracking target is detected and tracked using the KCF tracking algorithm, and the specific process for determining the position coordinates of the tracking target is:
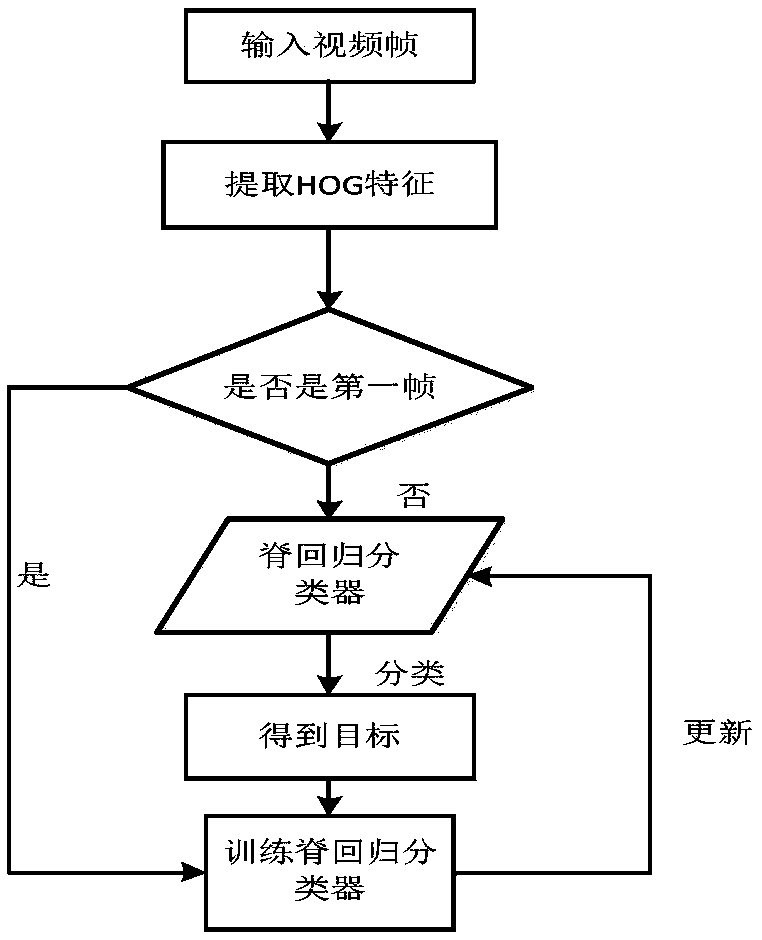
[0029] During the training process, the selected tracking target area is sampled, the tracking target area is used as a positive sample, and the background area is used as a negative sample to extract HOG (Histogram of Oriented Gradients) features, and the positive and negative samples are input into the ridge regression classifier Carry out training; in the detection process, the target area of the video frame is taken as the center, and the target area is sampled, and the obtained samples are classified by the trained ridge regressor, and the ridge regressor outputs the position of the target area, and the KCF tracking algorithm adopts The circular matrix generates samples, which ca...
specific Embodiment approach 3
[0031] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that the specific process of establishing the corresponding relationship between the pixel coordinate system and the tracking target in the world coordinate system is as follows:
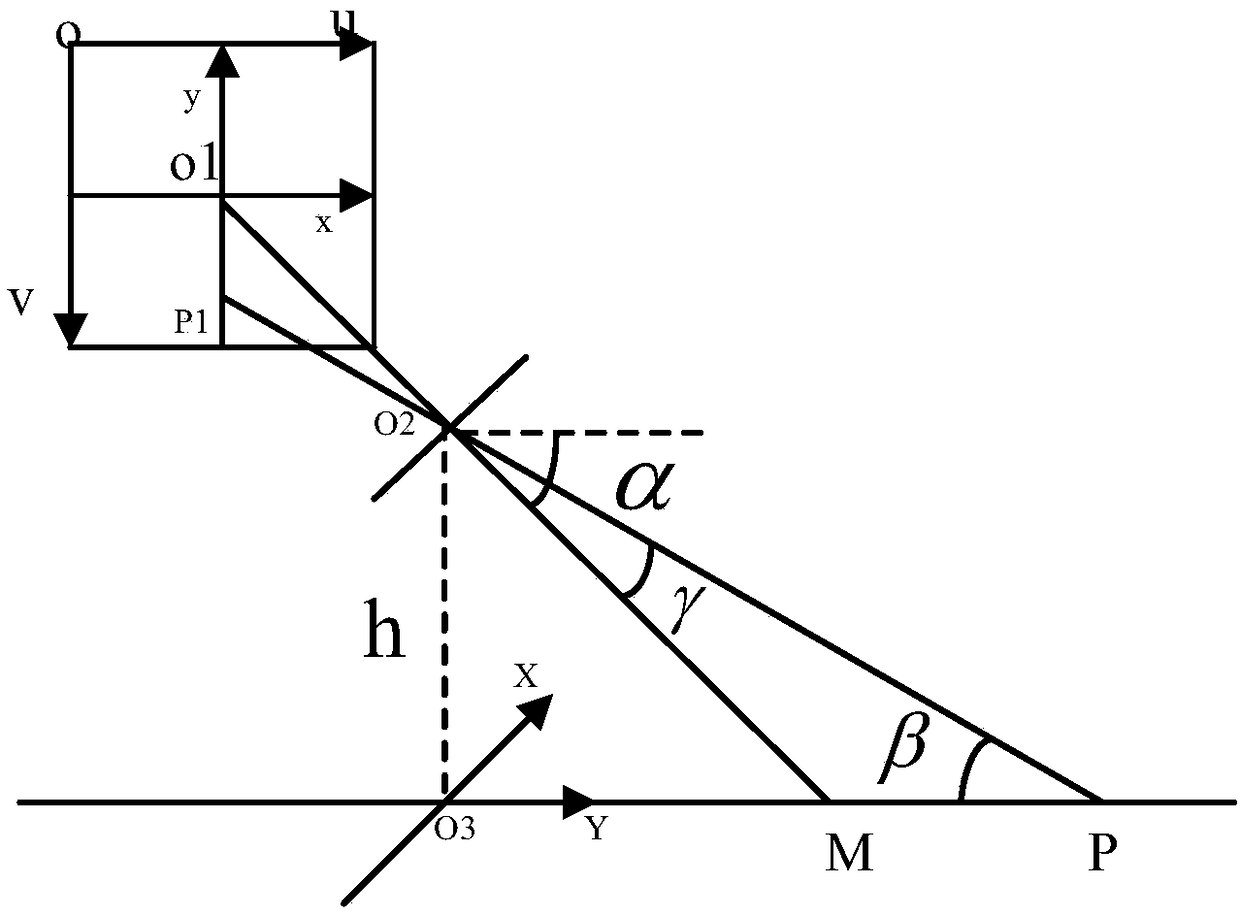
[0032] A visual feedback-based unmanned ship target tracking system of the present invention, its target positioning algorithm combines the depth positioning with the horizontal horizontal positioning method through the monocular vision model, and establishes the point (u, v) under the pixel coordinate system ) and the mapping relationship between the position coordinates (X, Y) in the world coordinate system.
[0033] Establish the mapping relationship between the point (u, v) in the pixel coordinate system and the position coordinates (X, Y) in the world coordinate system;
[0034] Such as image 3 As shown, the focal length of the camera is f, O 1 M is the optical axis position of the camera, the optical center...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More