

Control system of unmanned ship and unmanned ship
A technology of control system and unmanned ship, applied in the direction of control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve the incompatibility of the main control module and the difficulty of communication between the fish detection module and the main control module and other problems to achieve the effect of quickly and accurately finding fish, reducing the amount of data, and overcoming communication difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
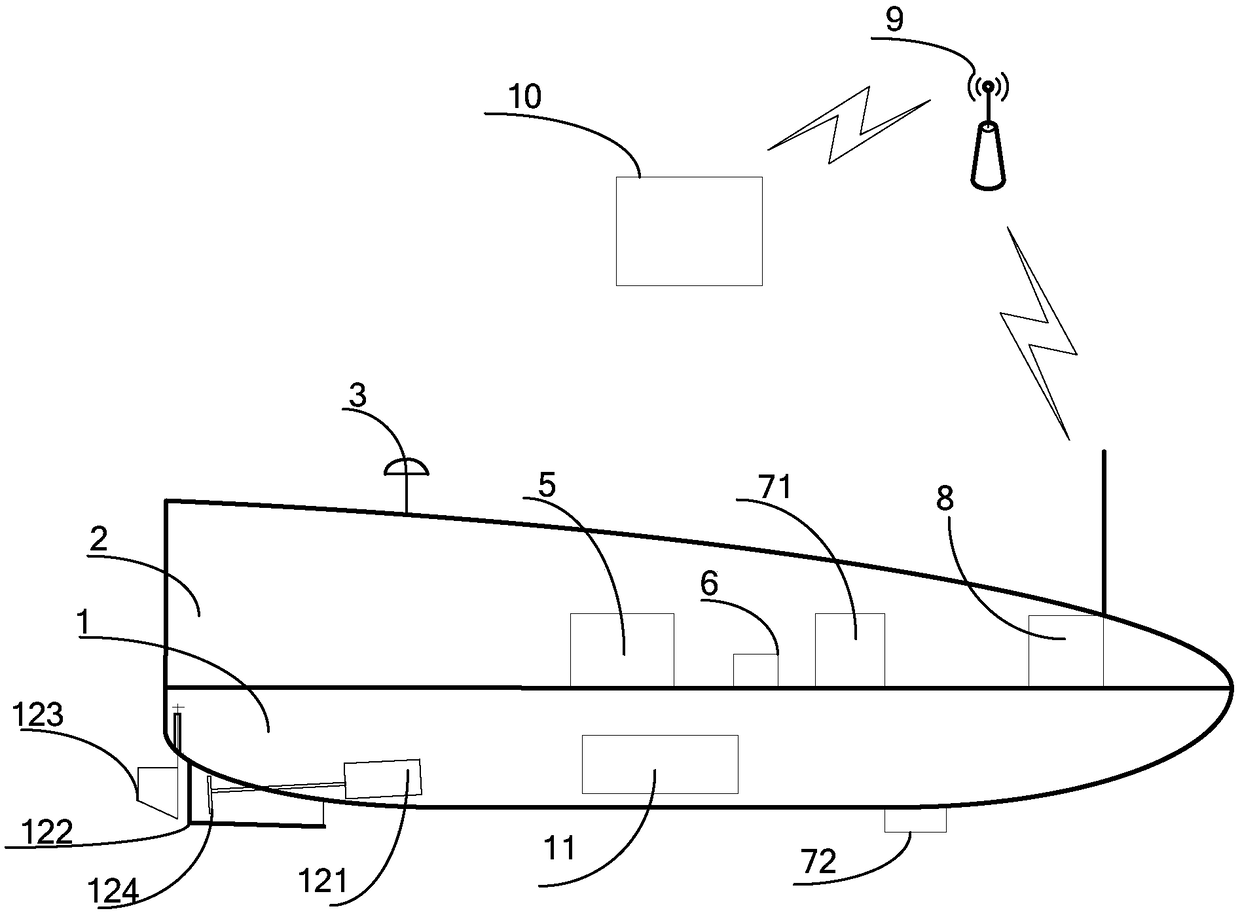
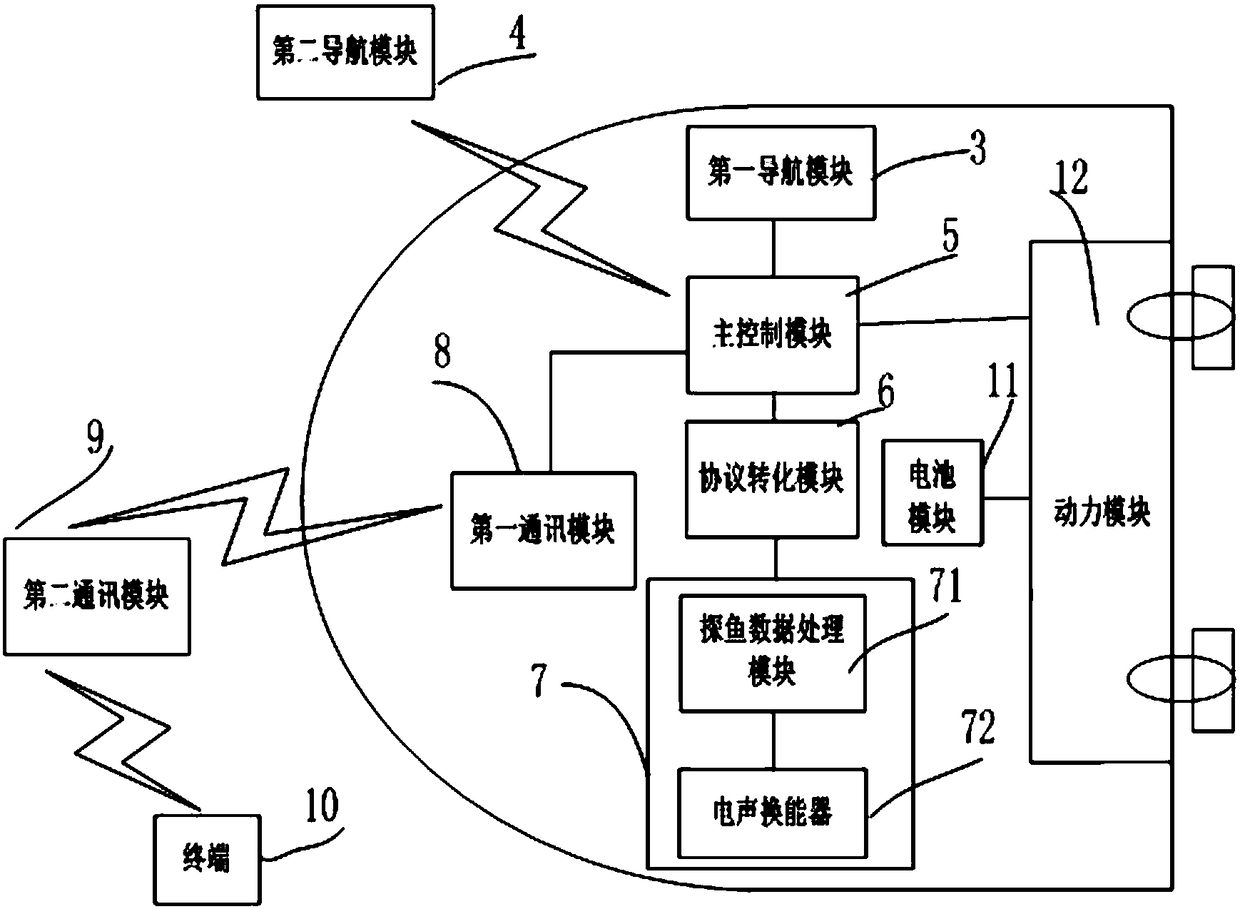
[0041] This embodiment provides an unmanned ship control system, such as figure 1 , figure 2 as shown,
[0042] An unmanned ship control system, comprising: a fish detection module 7, a protocol conversion module 6 and a main control module 5 that communicate sequentially;
[0043] The fish detection module 7 is used to detect relevant information of fish in the water, and process and obtain the first data, and send the first data according to the first data transmission protocol; wherein: the relevant information of the fish includes fish school size, One or a combination of fish density, fish location;
[0044] The protocol conversion module 6 is configured to receive the first data transmitted according to the first data transmission protocol and convert it into second data transmitted according to the second data transmission protocol;
[0045] The main control module 5 is configured to receive the second data transmitted according to the second data transmission proto...
Embodiment 2
[0063] Such as figure 1 , figure 2 As shown, the present embodiment is basically the same as Embodiment 1, the difference is:
[0064] The main control module 5 receives the third data sent by the first navigation module 3, and the third data is the latitude and longitude information of the unmanned ship.
[0065] After the main control module 5 receives the third data, it sends a second control command to the power module 12. The second control command is to control the position of the unmanned ship, the speed of the unmanned ship and the direction of the bow. one or a combination.
[0066] In this implementation, the first navigation module 3 is installed in the upper hull 2, and the first navigation module 3 can send the current latitude and longitude information of the unmanned ship to the main control module 5 of the unmanned ship. In this embodiment, the first navigation module 3 is preferably a GPS / Beidou positioning system, and the main control module 5 has built-i...
Embodiment 3
[0070] Such as figure 1 , figure 2 As shown, the present embodiment is basically the same as Embodiment 2, except that the main control module 5 receives the first control instruction sent by the second navigation module 4, and the first control instruction is to control the position of the unmanned ship. , one or a combination of the speed of the unmanned ship and the direction of the ship's head.
[0071] In this embodiment, the second navigation module 4 can manually adjust the position of the unmanned ship, the speed of the unmanned ship and the heading direction of the ship. The second navigation module 4 is carried by the operator of the unmanned ship, and is small in size and easy to carry. In this embodiment, the second navigation module 4 is preferably a handheld remote controller. The second navigation module 4 has the functions of transmitting and receiving signals. The second navigation module 4 is connected to the main control module 5, which can be connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More