

Relative Pose Measurement Method of Distributed POS Master and Subnodes Based on Single Camera Assistance
A technology of relative pose and measurement method, which is applied in the directions of measurement devices, surveying and navigation, navigation, etc., and can solve the problems of low alignment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
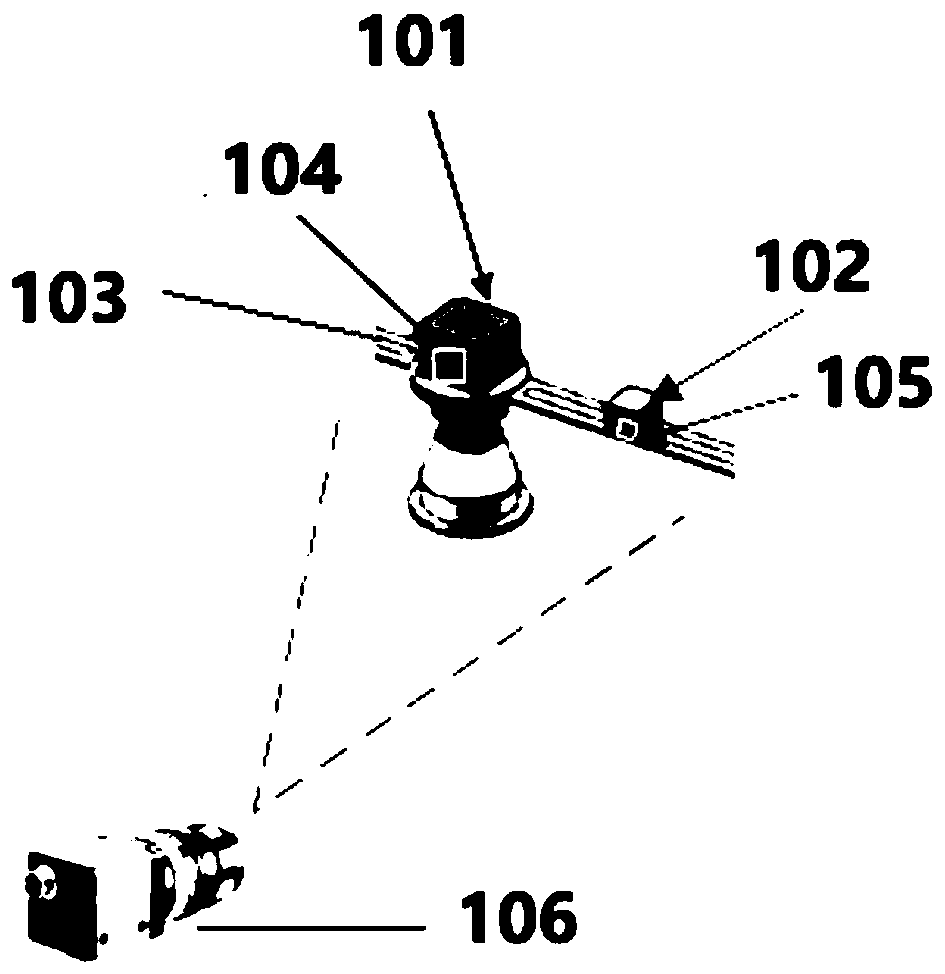
[0064] Below, refer to the attached Figure 1 to Figure 3 As shown, a method for measuring the relative pose of a distributed POS master and sub-node based on a single camera, including the following technical steps:
[0065] Step 1. Install the main POS101 and the sub-IMU102 on the installation nodes corresponding to the two ends of the flexible rod arm structure frame 103, paste the two targets on the surface of the main POS101 and the sub-IMU102 side, and define the target on the surface of the main IMU as the main target; the target on the surface of the sub-IMU is a sub-target;
[0066] Further, the main POS101 includes GPS and main IMU;
[0067] Further, the distributed POS includes: a high-precision main POS101 and a low-precision sub-IMU102;
[0068] As an application example, the main target 104 is pasted on the surface of the main POS101, and the sub-target 105 is pasted on the surface of the sub-IMU102;
[0069] Step 2. Complete the internal and external paramete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More