

Attitude measurement method based on phase-guided binocular vision dense marker matching
A technology of binocular vision and measurement method, which is applied in image analysis, instrumentation, calculation, etc., can solve the problems of epipolar matching error points, ambiguity matching of epipolar search matching points, etc., so as to improve the accuracy of pose measurement and reduce the amount of calculation. , the effect of improving the accuracy of coordinate extraction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
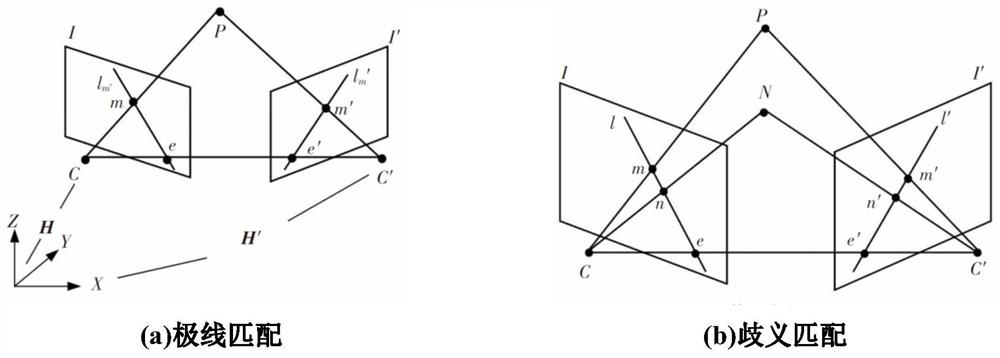
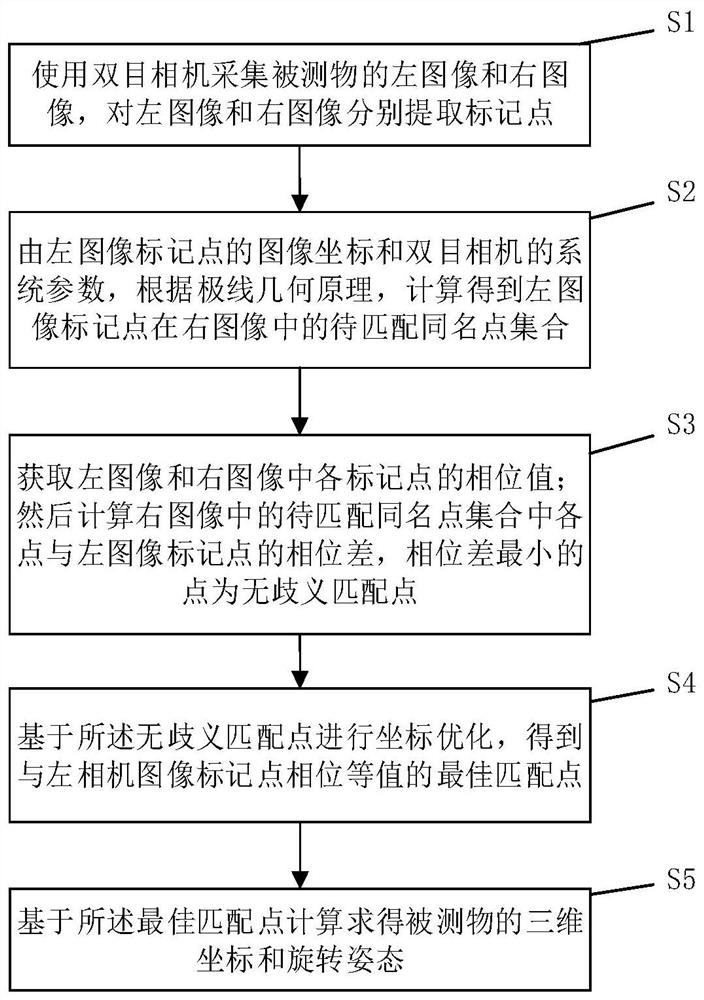
[0049] Due to the existing technology searching for matching points on the polar line, there will be ambiguous matching, such as figure 1 As shown, point P and point N are located on the same polar plane, the corresponding polar lines of the two points are the same, the left image point m has m' and n' on the corresponding polar line l' of the right image, (in addition, due to image distortion, perspective projection and image noise will also cause more epipolar matching error points), this embodiment provides an attitude measurement method based on phase-guided binocular vision dense marker point matching, such as figure 2 shown, including the following steps:
[0050] S101, first calibrate and calibrate the system parameters of the binocular camera, the method is as follows:
[0051] The two-dimensional plane target algorithm proposed by Zhang Zhengyou is used to calculate the internal parameters of the camera in the binocular vision system and the relative pose relationsh...
Embodiment 2
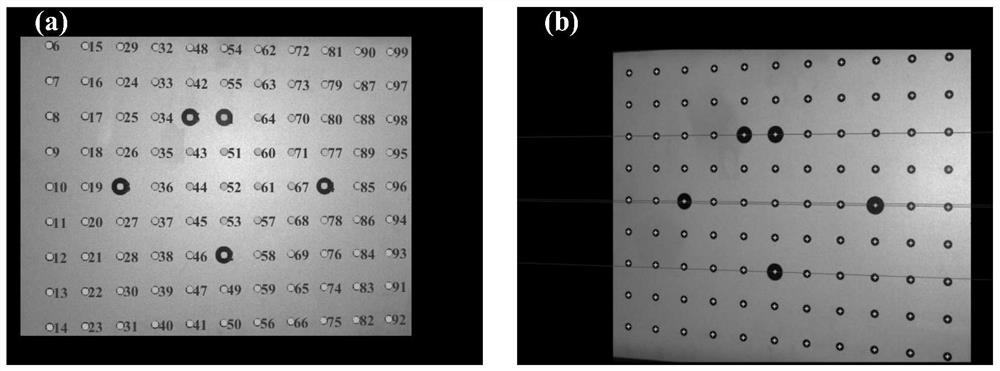
[0076] Since the prior art only relies on epipolar matching for regularly arranged feature points, it is most likely to cause incorrect matching. Therefore, in this embodiment, the marked points are pasted as a relatively regular distribution of rows and columns, and then the method described in Embodiment 1 is used to implement Example 1 The left and right camera markers captured by the calibrated binocular camera system are as follows Image 6 shown.
[0077] S201, performing circle center extraction based on ellipse boundary fitting on the captured left and right images, including binarization, region selection, edge detection, ellipse center positioning, etc., all 660 marked points of the captured images are successfully extracted, among which the markings of the left image are Point extraction results such as Figure 7 shown.
[0078] S202: Randomly select 20 marked points in the left image, search for the points with the same name in the right image, and match the poin...
Embodiment 3
[0083] An attitude measurement device based on phase-guided binocular vision dense marker point matching, comprising at least one processor, and a memory communicatively connected to the at least one processor; the memory stores instructions executable by the at least one processor, and the instructions are executed by at least one processor. A processor executes to enable at least one processor to perform any of the methods described above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More