

Structured light measurement method for large-size circular target for automatic capture by manipulator
A technology of target structure and manipulator, which is applied in the field of computer vision to achieve the effect of improving measurement robustness, filtering background interference, and improving pose measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0044] The large-size circular target structured light measurement method for the automatic capture of the manipulator, through the specially designed hand-eye vision sensor installed at the end of the manipulator, can realize the relative position and balance between the manipulator tool coordinate system and the capture target coordinate system under complex lighting conditions. Reliable and high-precision measurement of attitude, including the following steps:
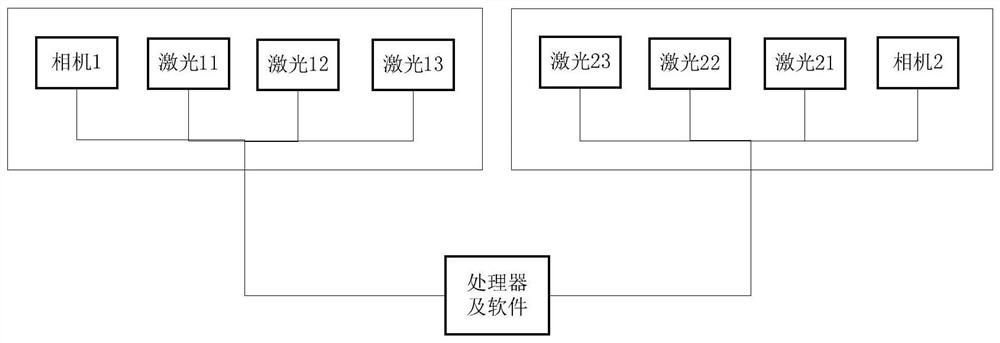
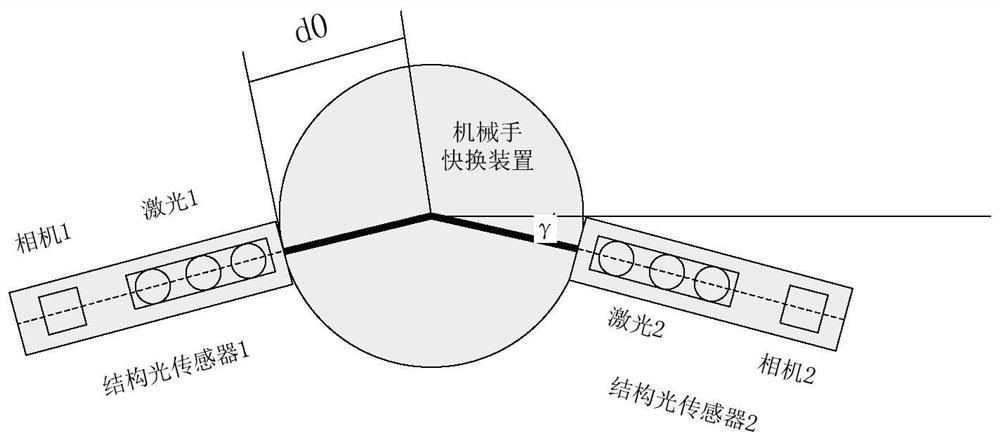
[0045] 1) The hand-eye vision sensor installed at the end of the manipulator is composed of two sets of specially designed multi-line structured light sensors. Each set of multi-line structured light sensors can independently realize pose measurement, and the fusion of two sets of data can improve the measurement accuracy.
[0046] 2) Project the laser light onto the front surface o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More