

Finite-time control method for model-uncertain spacecraft attitude tracking without unwinding
A technology with limited time and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the complex structure of large spacecraft, does not consider the internal uncertainty and external disturbance of the spacecraft system, and is difficult to mathematically model, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] In order to make the purpose, technical solutions and beneficial effects of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be noted that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
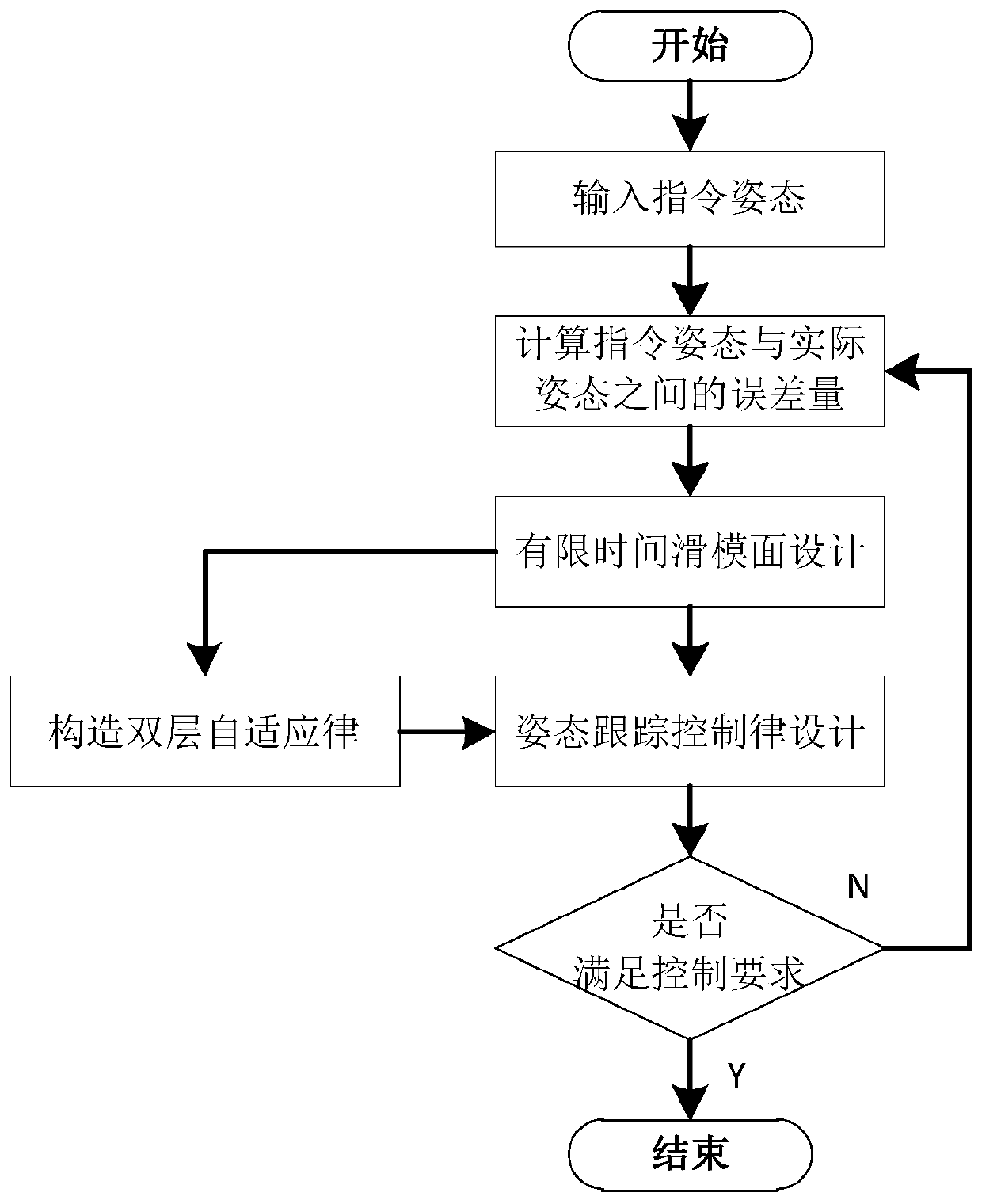
[0085] see figure 1 , the model uncertain spacecraft non-unwinding attitude tracking finite time control method provided by the present invention comprises the following steps:
[0086] Step S100: Input command attitude (R d ,ω d );
[0087] The command posture includes a command direction cosine matrix R d and command angular velocity vector ω d .
[0088] Step S200: Calculate the attitude tracking error amount between the command attitude and the actual attitude, the attitude tracking error amount includes: error direction cosine matrix and the error angular velocity vector
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More