

Autonomous underwater vehicle field source searching method and system based on gradient estimation
An underwater robot and gradient estimation technology, which is applied in the direction of mechanical equipment, combustion engines, and the control of finding targets, can solve problems such as field source search tasks without expanding the unknown
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention proposes an autonomous underwater vehicle (AUV) field source search method and system based on gradient estimation, which will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
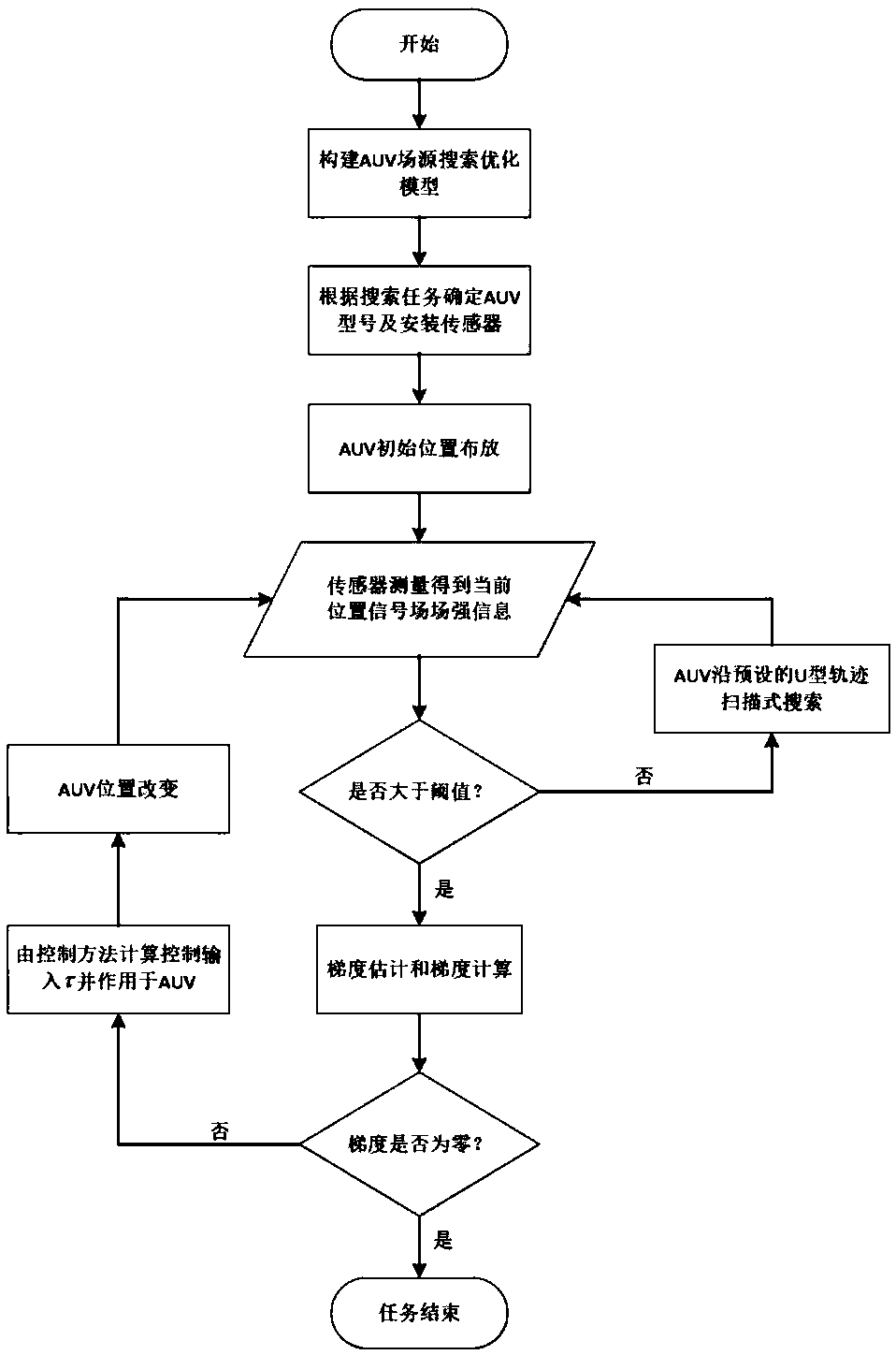
[0064] An autonomous underwater robot field source search method based on gradient estimation proposed by the present invention considers a signal field in which the field strength signal decreases as the distance from the field source increases. The overall process is as follows figure 1 shown, including the following steps:
[0065] 1) Build an AUV field source search optimization model;
[0066] The field strength signal of the signal field concerned in the present invention decreases as the distance from the field source increases, and the predetermined AUV height and attitude are given in advance, and the modeling of the optimization problem is carried out under this condition.
[0067] 1-1) Establish the dyn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More