

Dynamic compensation method for MEMS (Micro Electro Mechanical System) gyroscope Z-axis zero offset on the basis of Kalman filtering
A Kalman filter and dynamic compensation technology, applied to instruments, measuring devices, etc., can solve problems such as large deviation in heading angle measurement and inaccurate Z-axis measurement values
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
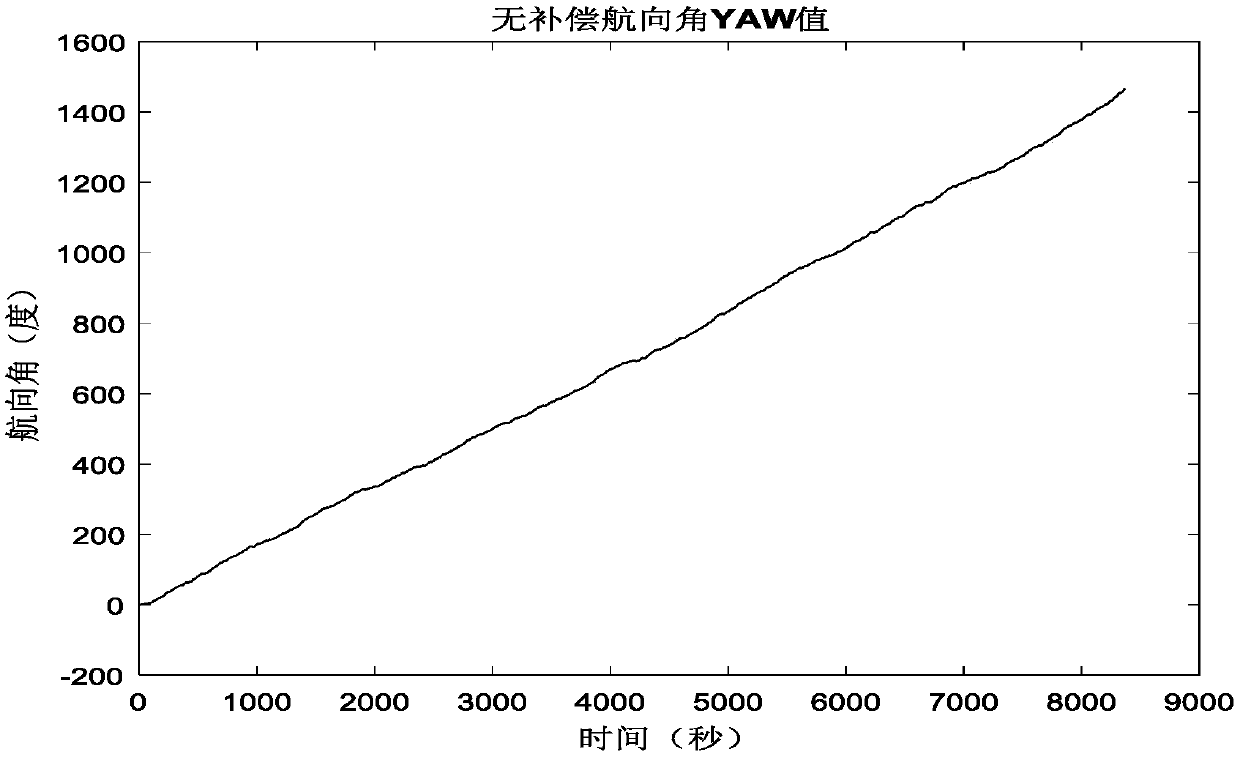
[0046] Through the long-term tracking measurement of the MEMS gyroscope, it is found that the zero bias of the MEMS gyroscope has the characteristics of short-term stability and long-term slight change. Taking one of the typical measurement values as an example, the measured heading angle value without compensation is as follows: figure 1 shown.
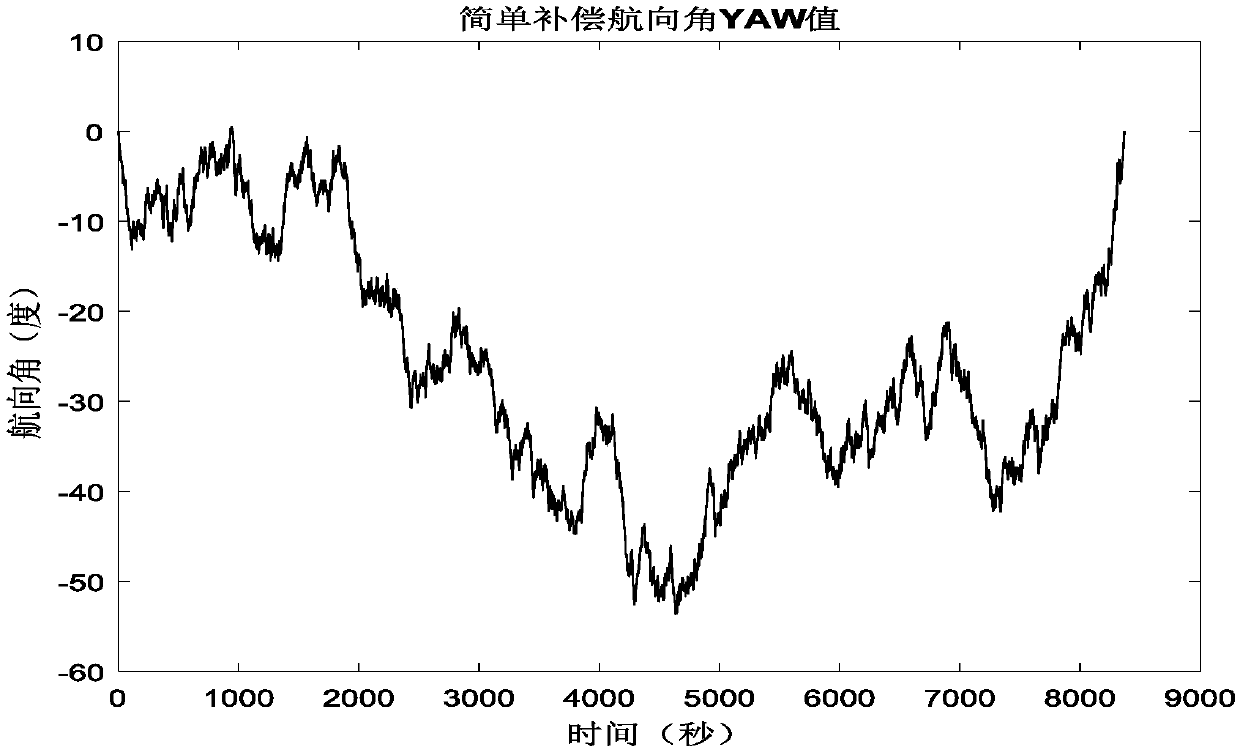
[0047] After measuring the slope, do simple compensation to get the heading angle value as figure 2 As shown, it can be seen from the above figure that simple compensation cannot solve the zero offset problem of the Z axis well.
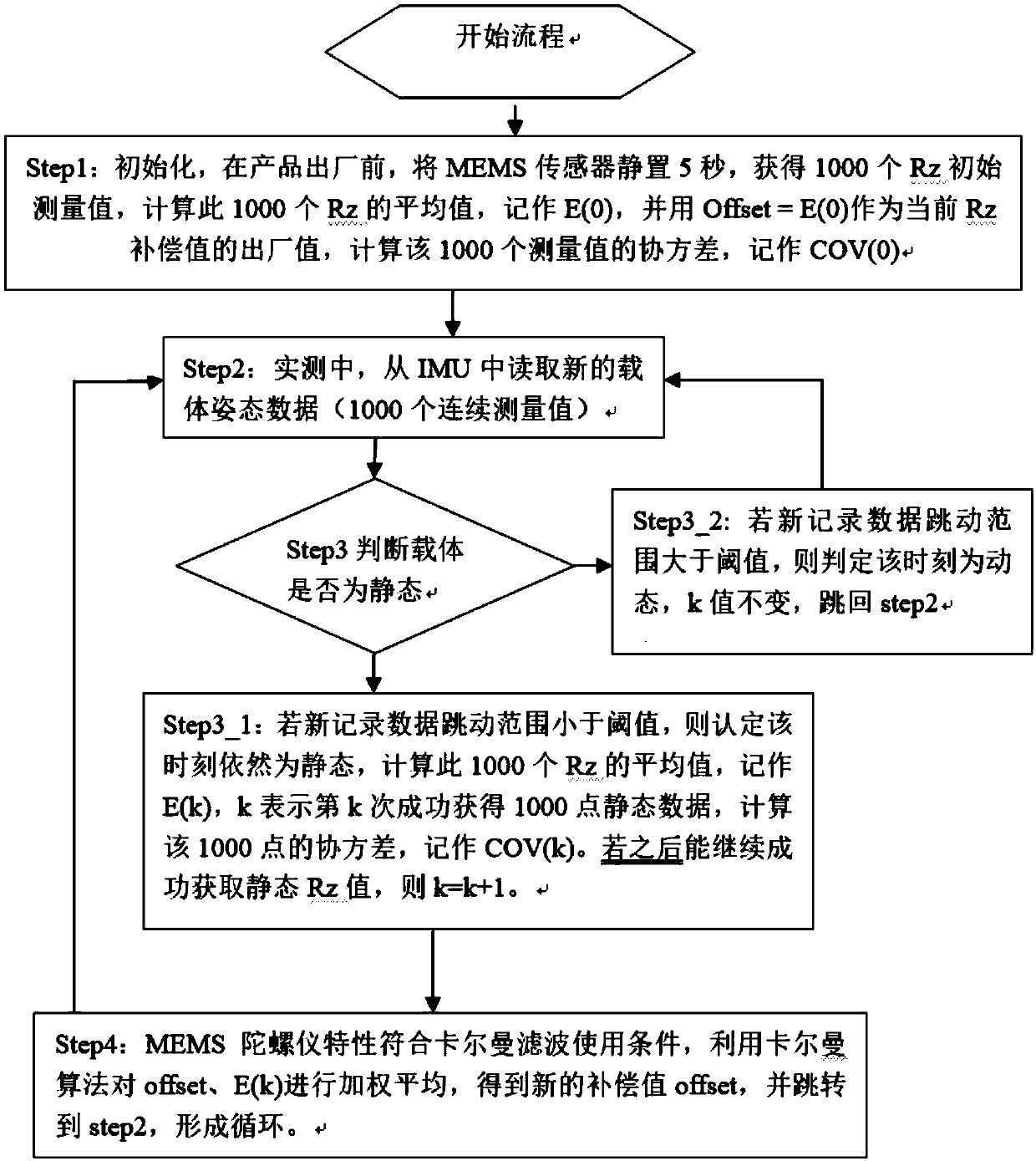
[0048] This patent adopts a dynamic adaptive Kalman compensation algorithm. By capturing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More