

Lead wire connecting method for live working robot
A technology for live work and robots, applied in circuit/collector parts, connections, circuits, etc., can solve the problems of designing fixtures and clamps, cumbersome operation steps, collision with mechanical arms, etc., to avoid falling off, simplify operation steps, Avoid negative effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
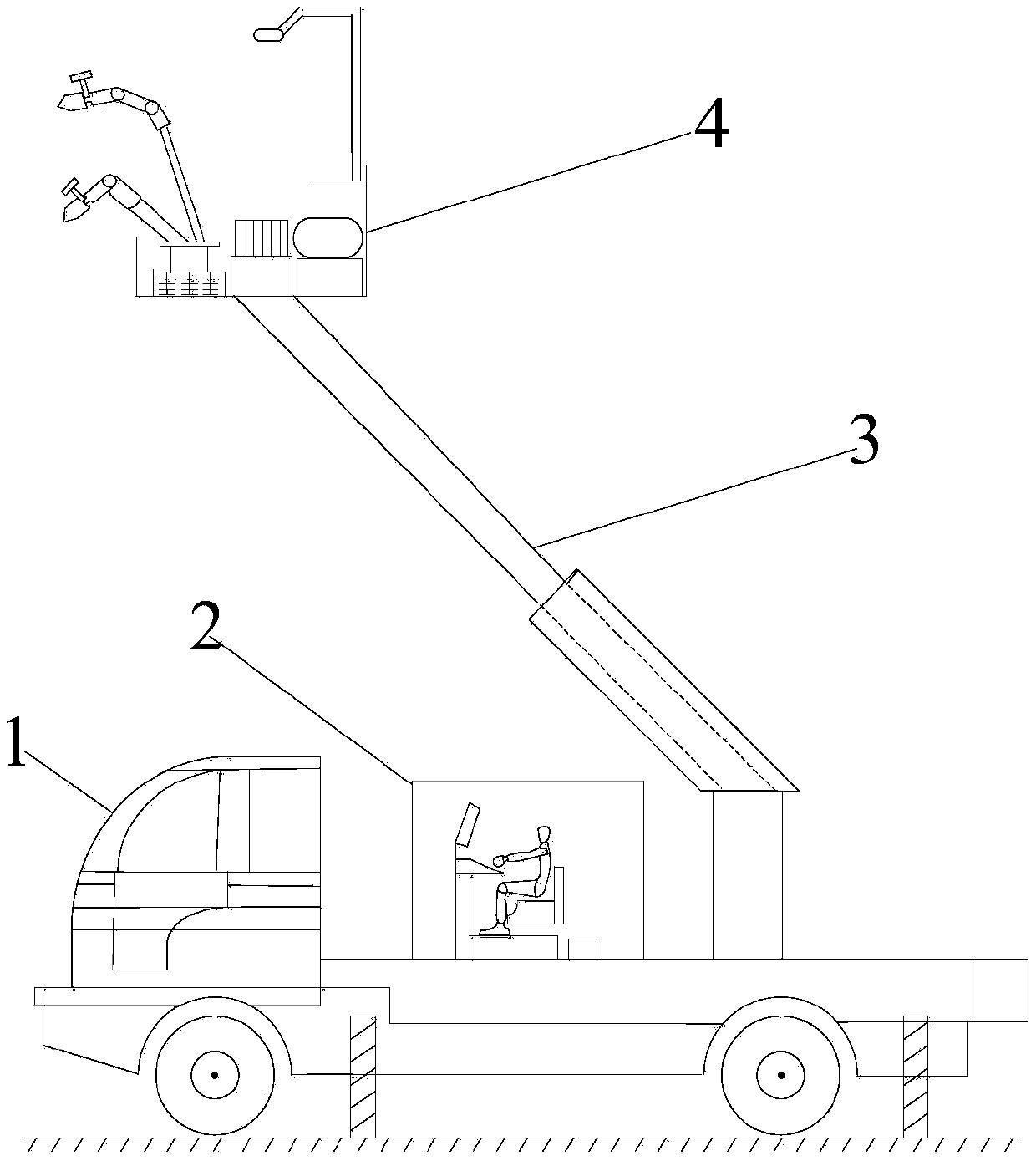
[0053] As an implementation, combining Figure 9 , in the working environment, high-voltage wires 104 are erected between adjacent towers 101 , and crossarms 102 are installed on the towers 101 for fixing and installing drop-out fuses 103 . The upper end of the drop-out fuse 103 is drawn out with a lead wire 105, and the upper end of the lead wire 105 is placed in a safe position in the air in advance.
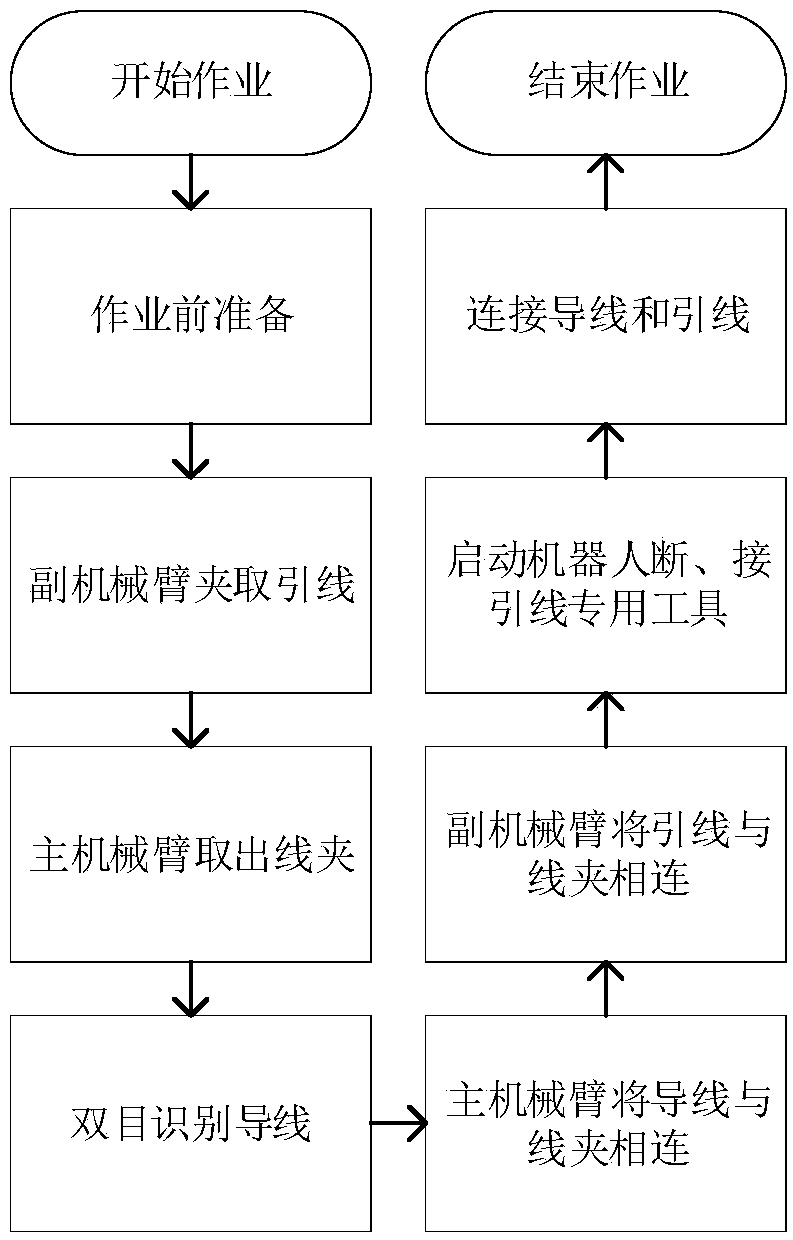
[0054] The lead wire connection method of the live working robot of the present invention comprises the following steps:
[0055] 1. The staff prepares for the live work robot before connecting the lead wire, checks the weather conditions, checks the wire number, arranges the site, and performs installation inspection and testing of the robot's end tools:
[0056] 1.1 Check the weather conditions, surrounding environment, line installation and safety measures.
[0057] 1.2 Arranging the site: Set up safety guardrails, operation signs, and related warning signs at the work si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More