

Mechanical finger adopting paper folding structure for transmission
A technology of origami structure and mechanical fingers, which is applied in the field of manipulators, can solve the problems of difficult control, large space to install control units, complex structure of control units, etc., and achieve the effect of fast response, convenient control and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
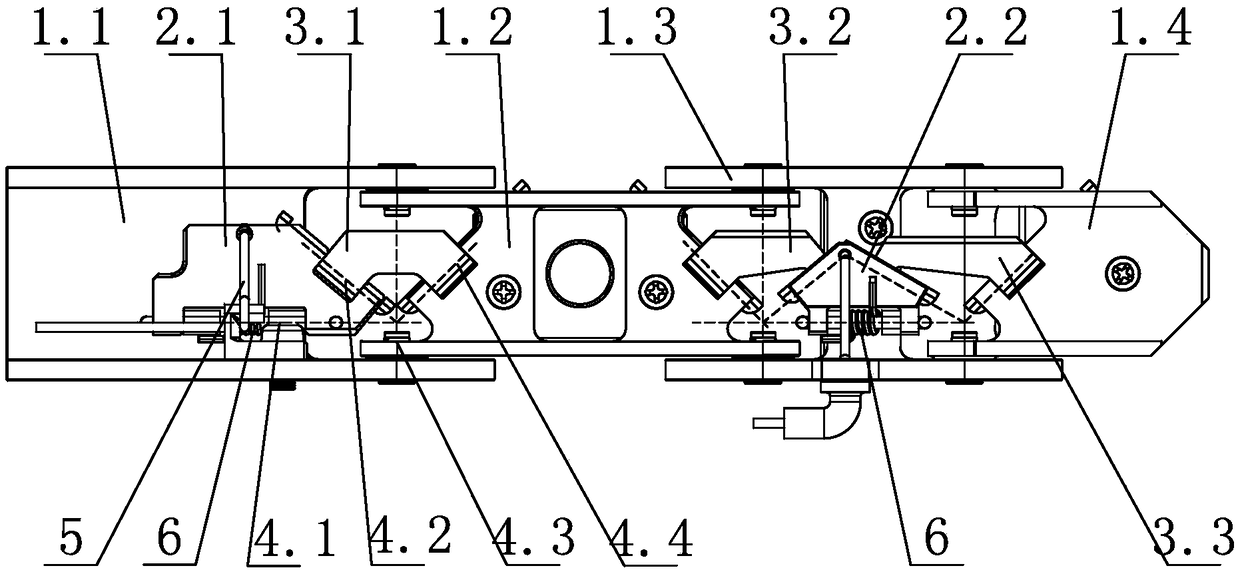
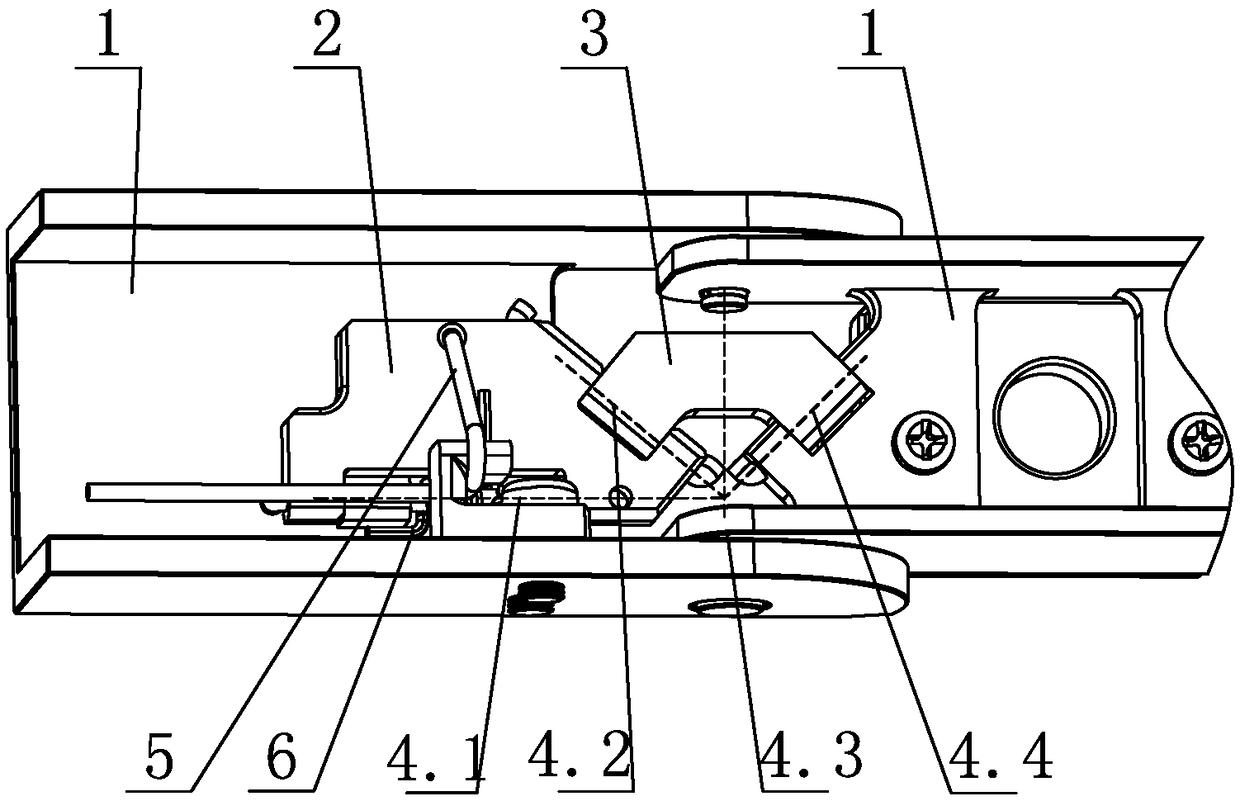
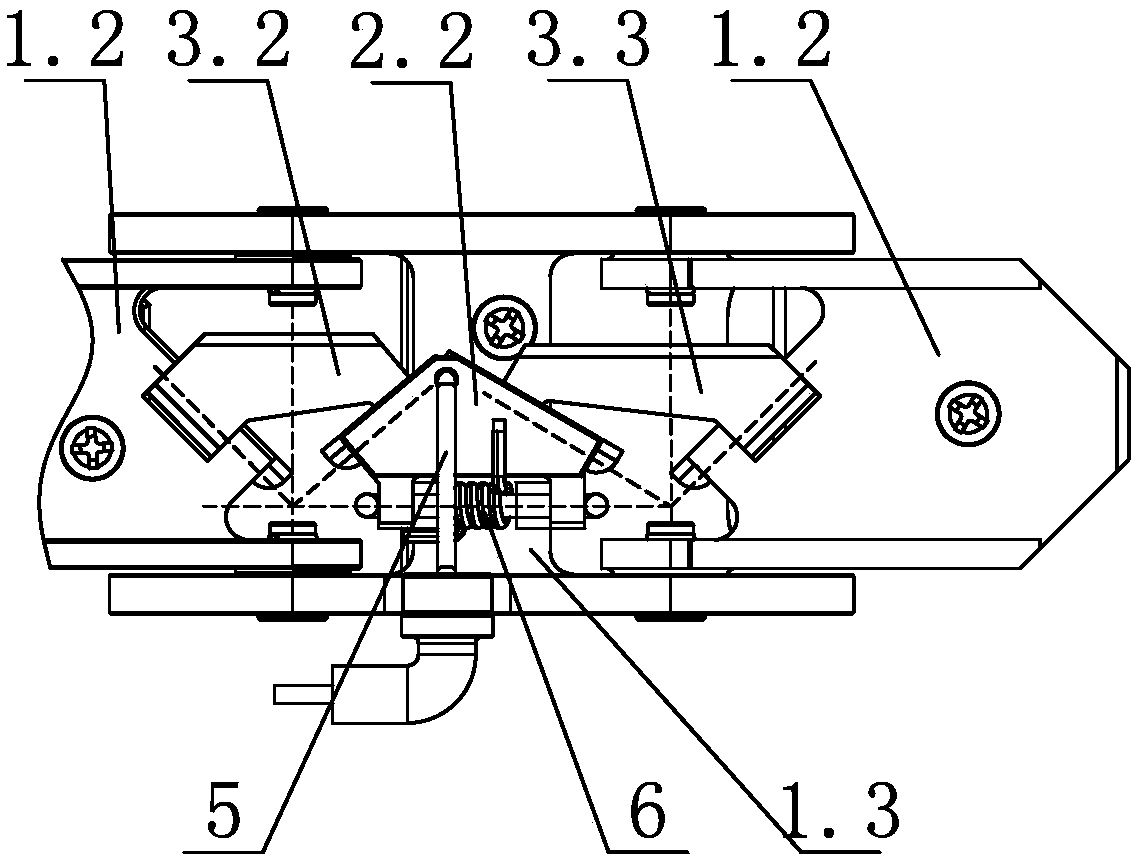
[0029] Such as Figure 6 As shown, a mechanical finger adopting origami structure transmission includes several knuckles 1 hinged in turn, and a knuckle driving device that controls the flexion and extension of the knuckles 1; the knuckle driving device is an origami-shaped linkage structure; the origami-shaped The linkage structure is composed of an origami structure formed by a plurality of creases converging at one point, an origami page is formed between two adjacent creases, two adjacent origami pages are hinged through creases, and multiple origami pages are hinged and linked in turn. Such as figure 2 As shown, the origami-shaped linkage structure includes a drive plate 2 and a connecting plate 23 that constitute a power input end. The driving plate 2 is hinged on a knuckle 1 through a first hinge axis 4.1; Hinged at the end of the drive plate 2, the other end of the connecting plate 3 is hinged on the adjacent knuckle 1 through the third hinge axis 4.3; the first hing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More