

An automatic shrimp-removing robot
A robot and shrimp line technology, which is applied in the fields of shrimp/lobster processing, slaughtering, food science, etc., can solve the problems of cumbersome process, affecting the taste of eating, and the inability to complete the work of removing shrimp lines automatically, so as to achieve a wide range of control and improve The effect of degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solutions of the present invention will be further specifically described below through the embodiments and in conjunction with the accompanying drawings.
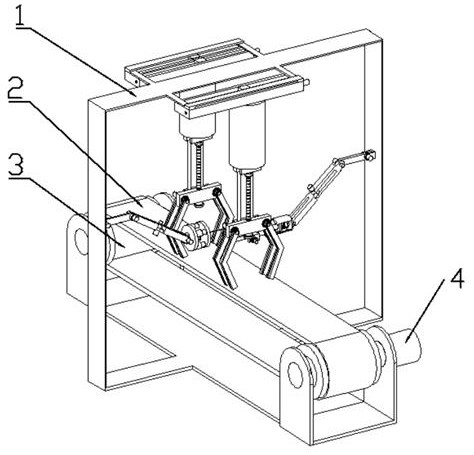
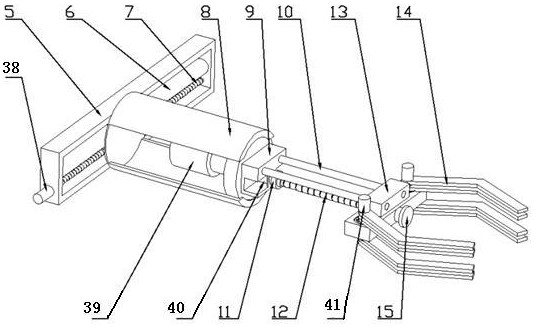
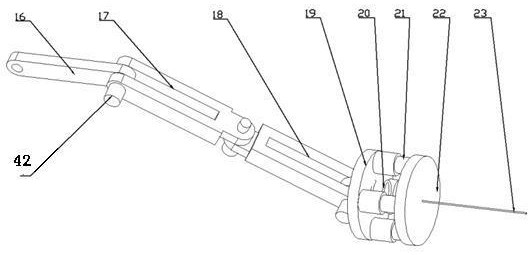
[0016] Such as figure 1 , figure 2 , image 3 , Figure 4Shown, a kind of robot that automatically removes shrimp line is characterized in that: comprise main frame 1, sprocket shaft 3, belt 2, first stepping motor 4 grasping part, pick-up part, thread lifting part; Grabbing part comprises: Stepping motor 4, screw rack 5, translation guide rail 6, translation screw rod 7, rotating motor rack 8, rotation screw seat 9, claw telescopic guide rail 10, coupling 11, claw telescopic screw rod 12, claw seat 13. Claw part 14, screw sleeve 15, second stepping motor 38, third stepping motor 39, fourth stepping motor 40, fifth stepping motor 41; thread take-up part includes: sixth stepping motor 42 , needle connecting rod 16, the first up and down adjustment rod 17, the first left and right adjustment rod 18,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More