

Mechanical arm tool coordinate system self-calibration method
A tool coordinate system, robotic arm technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as difficult parameters, determination, and limitation of robot applications.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] It should be pointed out that the following is a further detailed description of the present invention in conjunction with the accompanying drawings and embodiments. The specific embodiments described here are only used to explain the present invention and should not be regarded as having any limiting effect on the protection scope of the present invention. In addition, the embodiments in this section and the features in the embodiments can be combined with each other under the condition of no conflict.
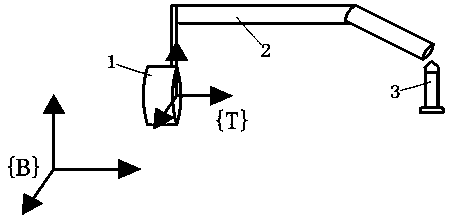
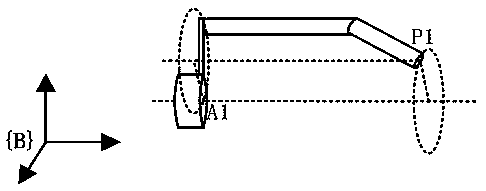
[0030] see Figure 1 to Figure 2 , a self-calibration method for a tool coordinate system of a manipulator provided in a preferred embodiment of the present invention, comprising the following steps:
[0031] (1) Fix and install the tool 2 on the rotating shaft 1 at the end of the mechanical arm, and return the rotating shaft 1 equipped with the tool 2 to zero, at this time, bring the top 3 close to the center point of the end of the tool 2 until it coincides , fix th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More