

Processing method, device and equipment of AR-based slam algorithm
An algorithm and terminal equipment technology, applied in image data processing, computing, instruments, etc., can solve the problems of 3D virtual object drift and jitter, 3D virtual object offset distance, etc., to avoid drift and jitter, and improve efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
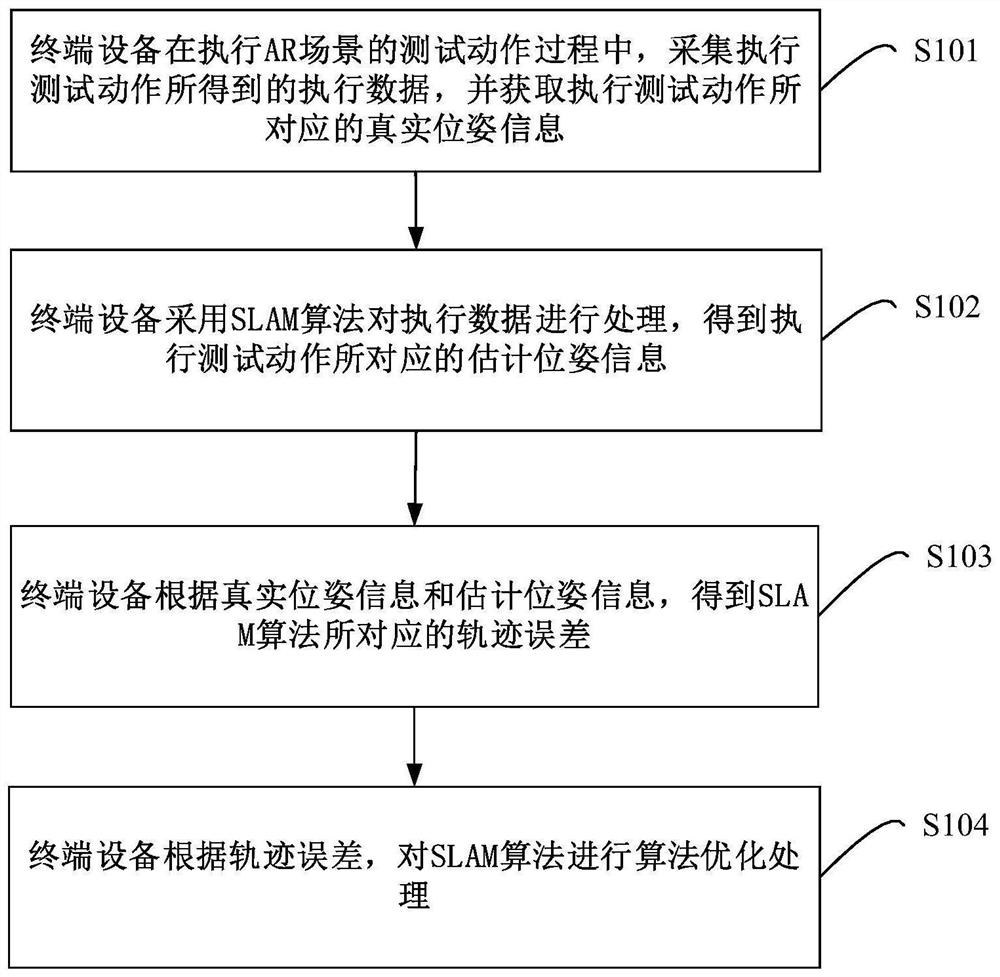
[0047] figure 1 It is a flow chart of the processing method of the AR-based SLAM algorithm provided by Embodiment 1 of the present invention. The embodiment of the present invention aims at the existing evaluation of the AR-based SLAM algorithm applied to the mobile terminal is manual testing and human subjective judgment, resulting in the drift and jitter of the 3D virtual object in the real scene in the AR scene presented by the mobile terminal and For the problem of large offset distance of 3D virtual objects during relocation, a processing method based on AR SLAM algorithm is provided. The method in this embodiment is applied to a terminal device. The terminal device may be a mobile terminal such as a smart phone, a tablet, or an AR device, or a smart device applied to an AR scene. In other embodiments, the method may also be applied For other devices, this embodiment uses a terminal device as an example for schematic description. like figure 1 As shown, the specific st...
Embodiment 2
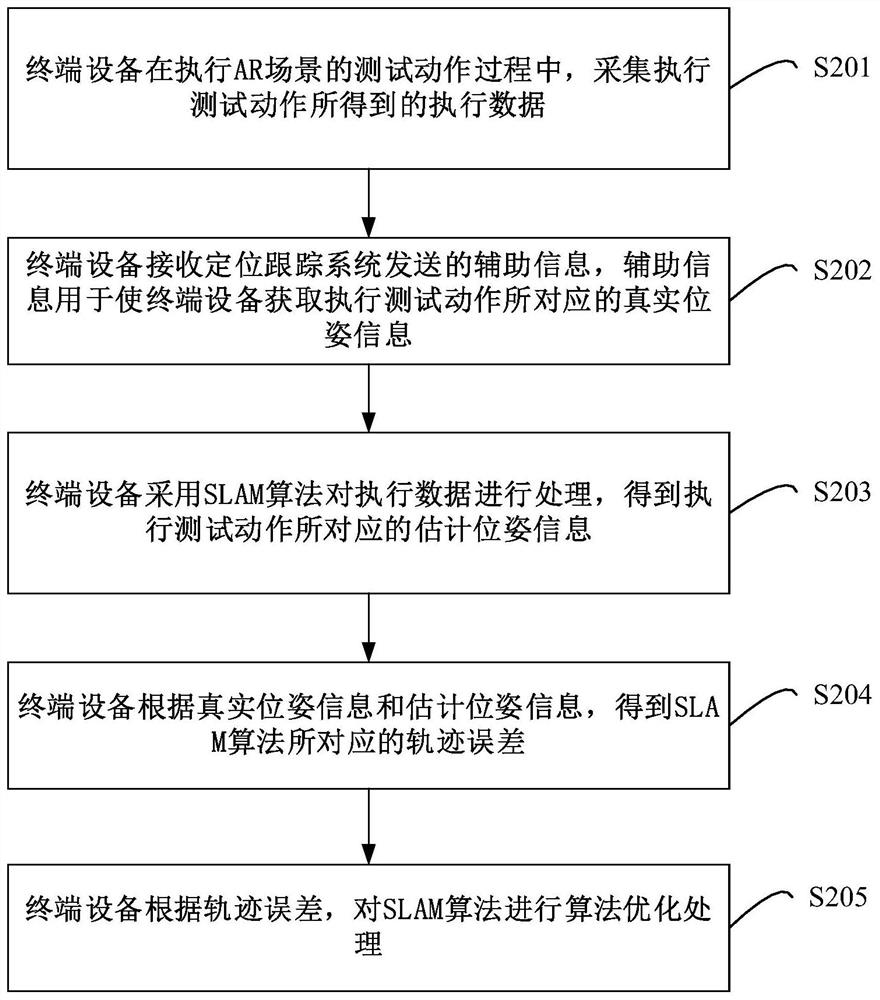
[0067] figure 2 It is a flow chart of the processing method of the AR-based SLAM algorithm provided by Embodiment 2 of the present invention. On the basis of the first embodiment above, in this embodiment, as figure 2 As shown, the specific steps of the method are as follows:
[0068] In step S201, the terminal device collects execution data obtained by executing the test action during the execution of the test action of the AR scene.
[0069] In this embodiment, during the process of executing the test action of the AR scene, the terminal device collects the execution data obtained by executing the test action, which may be specifically implemented in the following manner:
[0070] In the process of executing the test action of the AR scene, the terminal device collects the video data obtained by executing the test action through the camera of the terminal device, and collects the video data obtained by executing the test action through the inertial measurement unit (IMU)...
Embodiment 3
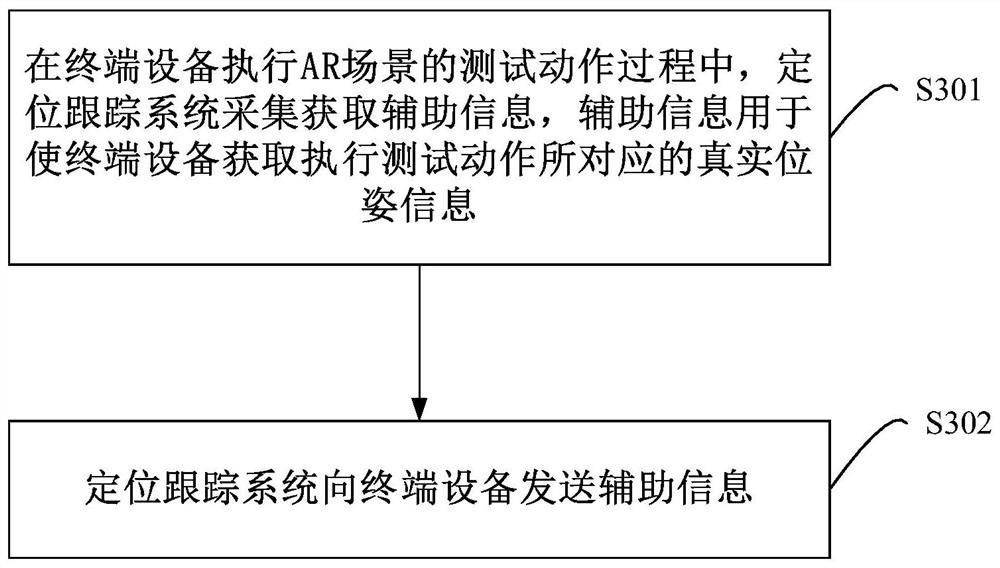
[0112] image 3 It is a flow chart of the processing method of the AR-based SLAM algorithm provided by Embodiment 3 of the present invention. The embodiment of the present invention aims at the existing evaluation of the AR-based SLAM algorithm applied to the mobile terminal is manual testing and human subjective judgment, resulting in the drift and jitter of the 3D virtual object in the real scene in the AR scene presented by the mobile terminal and For the problem of large offset distance of 3D virtual objects during relocation, a processing method based on AR SLAM algorithm is provided. The method in this embodiment is applied to a location tracking system, such as the Lighthouse system of HTC Vive, etc. In other embodiments, the method can also be applied to other devices. This embodiment uses a location tracking system as an example for schematic illustration.
[0113] In this embodiment, the Lighthouse system is taken as an example to illustrate the positioning and trac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More