Laser point cloud data set augmentation method and device, and readable storage medium
A technology of laser point cloud data and laser point cloud, which is applied in the field of data processing, can solve the problems of low efficiency of laser point cloud labeling, achieve the effects of reducing the degree of manual participation, efficient acquisition, and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
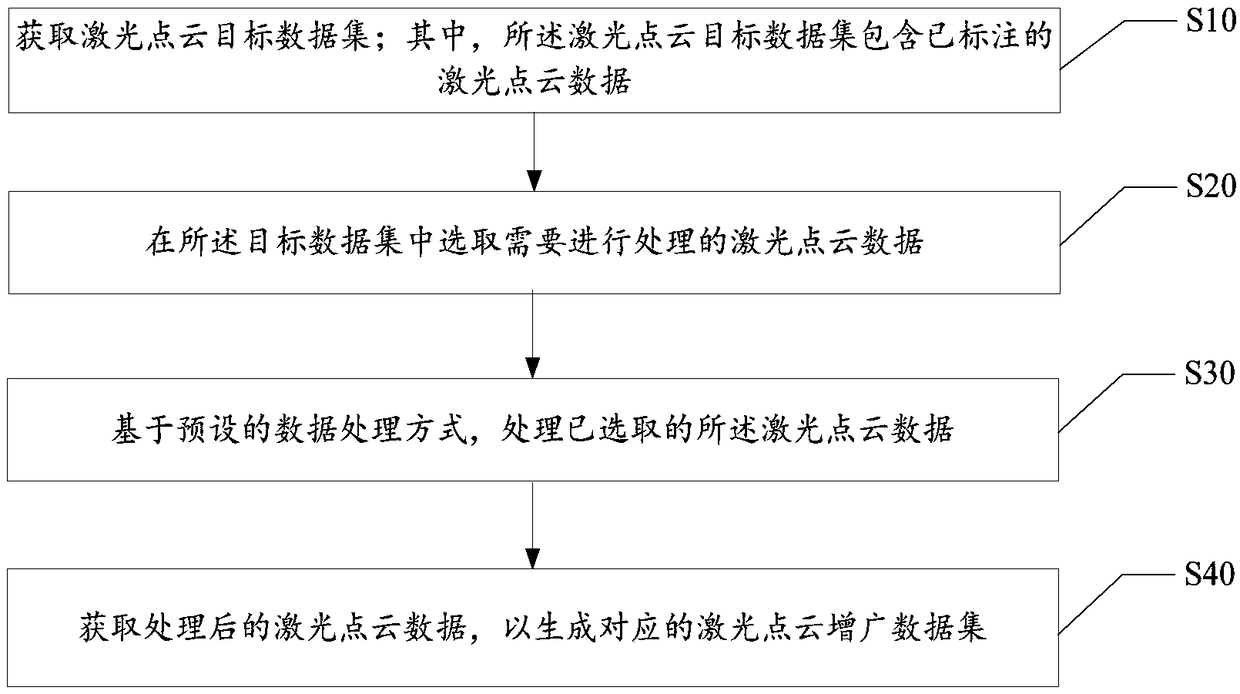
[0066] Please refer to figure 2 , figure 2 For the first embodiment of the laser point cloud data set augmentation method of the present invention, the method includes the following steps:
[0067] Step S10, acquiring a laser point cloud target data set; wherein, the laser point cloud target data set includes marked laser point cloud data;
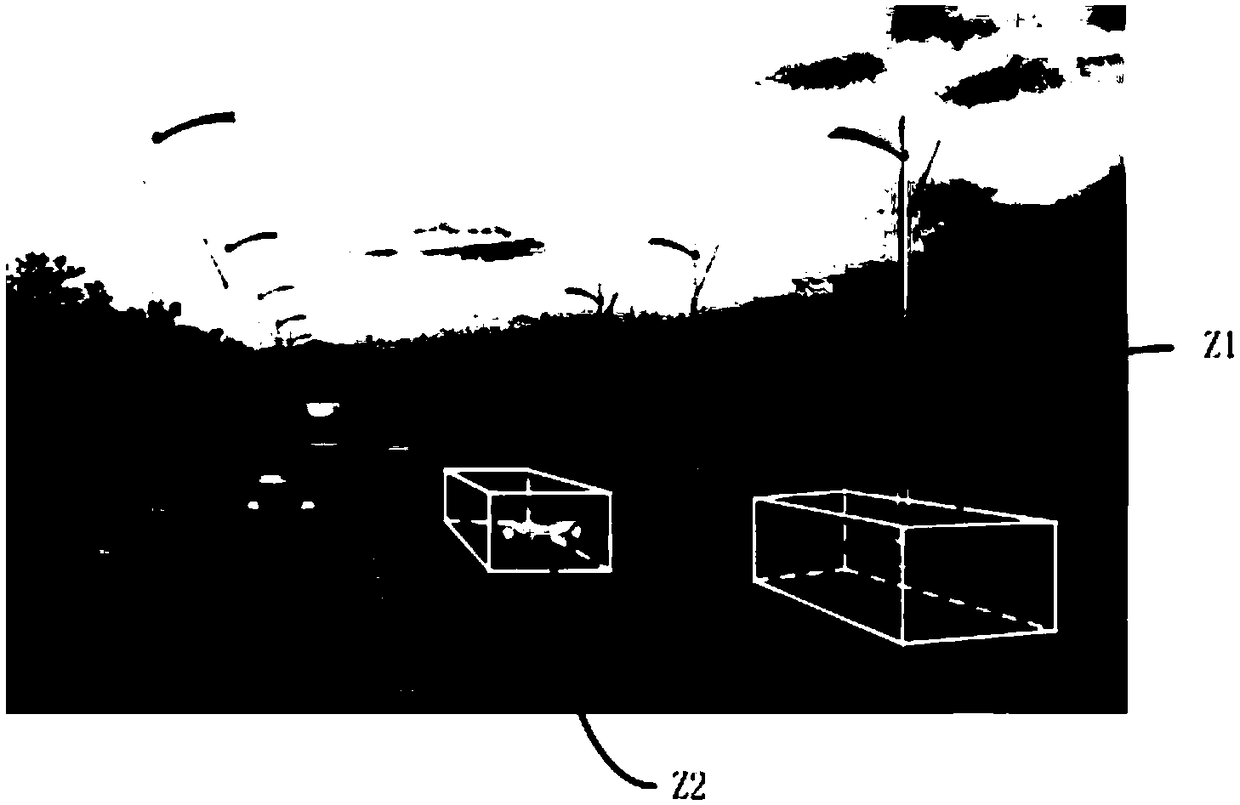
[0068] The laser point cloud target data set is a collection of laser point cloud data obtained after detection by laser radar, which includes several laser point cloud data that have been marked. The marked laser point cloud data specifically refers to several laser point cloud data marked in the laser point cloud target data set; for example, for image 3 The contour of a certain car in the real road image is marked to define the outer contour of the car. The point cloud data corresponding to the marked points of the car outline (not marked in the figure) is the marked laser point cloud data.
[0069] It should be noted that the "l...
specific Embodiment approach 1
[0080] Obtain preset rotation parameters; rotate the selected laser point cloud data according to the preset rotation parameters, so as to transform the coordinates of the laser point cloud data.
[0081] The preset rotation parameters specifically include the position of the rotation axis (or rotation point), the rotation direction and the rotation angle. It should be noted that the rotation here refers to the rotation of the laser point cloud data of each object around different rotation axes, that is, the relative position of each object and its laser point cloud data changes after the rotation is performed. Wherein, the rotation axis adopted when the laser point cloud data of the object is rotated is preferably a normal line passing through the center of gravity of the object and perpendicular to the plane where the object is located. For example, Figure 4 for right image 3 The schematic diagrams of the new bounding boxes Z1-1 and Z2-1 are obtained after the laser poin...
specific Embodiment approach 2
[0082] Obtain preset stretching parameters; perform stretching transformation on the selected laser point cloud data according to the preset stretching parameters, so as to transform the coordinates of the laser point cloud data.
[0083] The preset stretching parameters specifically include the position of the stretching base point, the stretching direction, and the stretching distance. For example, if Figure 5 as shown, image 3 After stretching and transforming the original bounding boxes Z1 and Z2 in Figure 5 The length, width and height of the 3D bounding box of the vehicle in the vehicle may change to form new 3D bounding boxes Z1-2, Z2-2; at the same time, the coordinates of the marked laser point cloud data in the 3D bounding box will also change with the The change forms a new labeled laser point cloud data.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com