

Time-domain-to-weight driver-automatic driving system flexible take-over method
An automatic driving and driver technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as vehicle instability, difficult to take over instantaneous smooth transition, sudden changes in vehicle status, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention is described in detail below in conjunction with accompanying drawing:
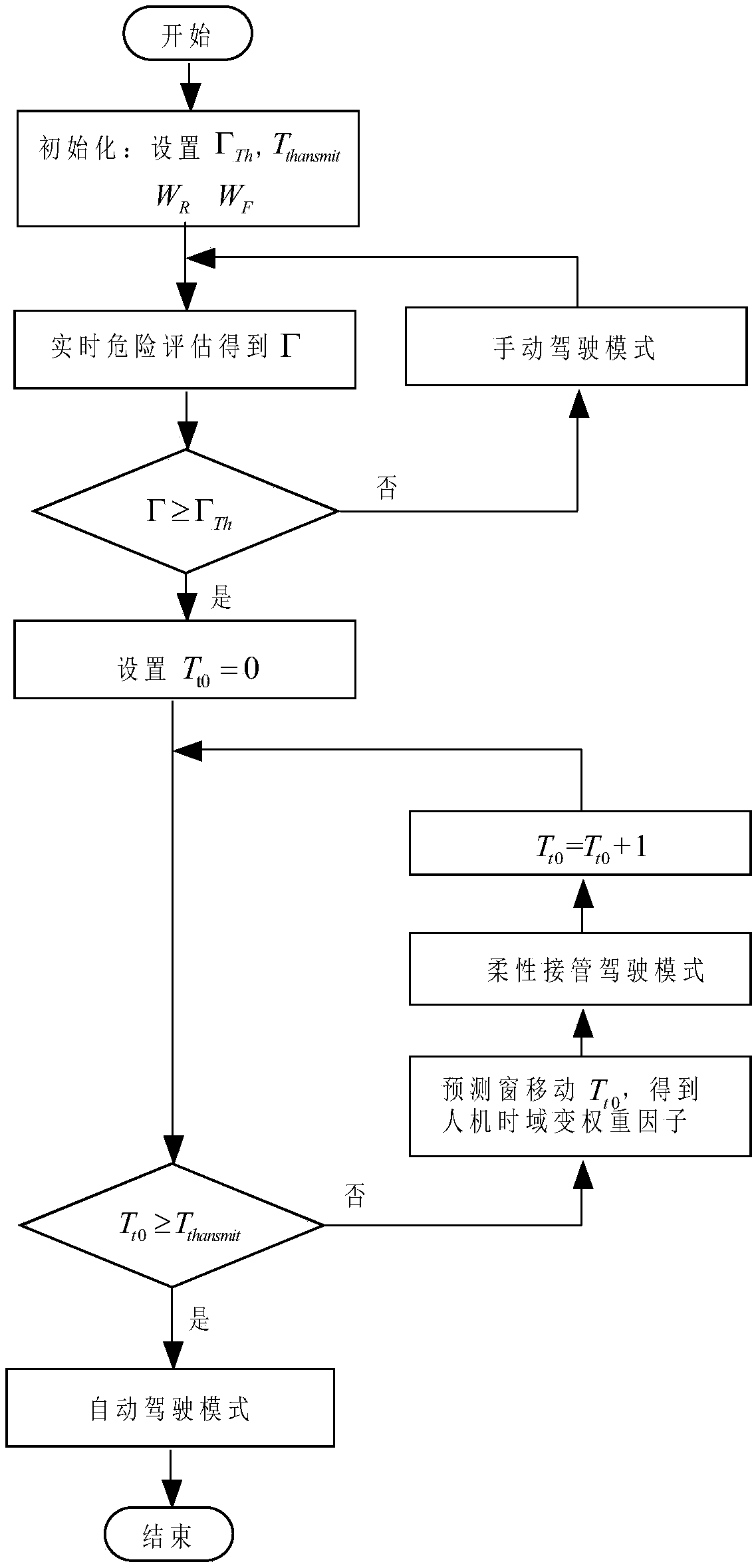
[0084] The present invention is a driver-automatic driving system flexible takeover method with variable weight in time domain, the method flow chart is as follows figure 1 As shown, the specific implementation steps are as follows:
[0085] Step 1. Design MPC (Model Predictive Control) automatic driving controller
[0086] (1) Establishment of automatic driving controller design model
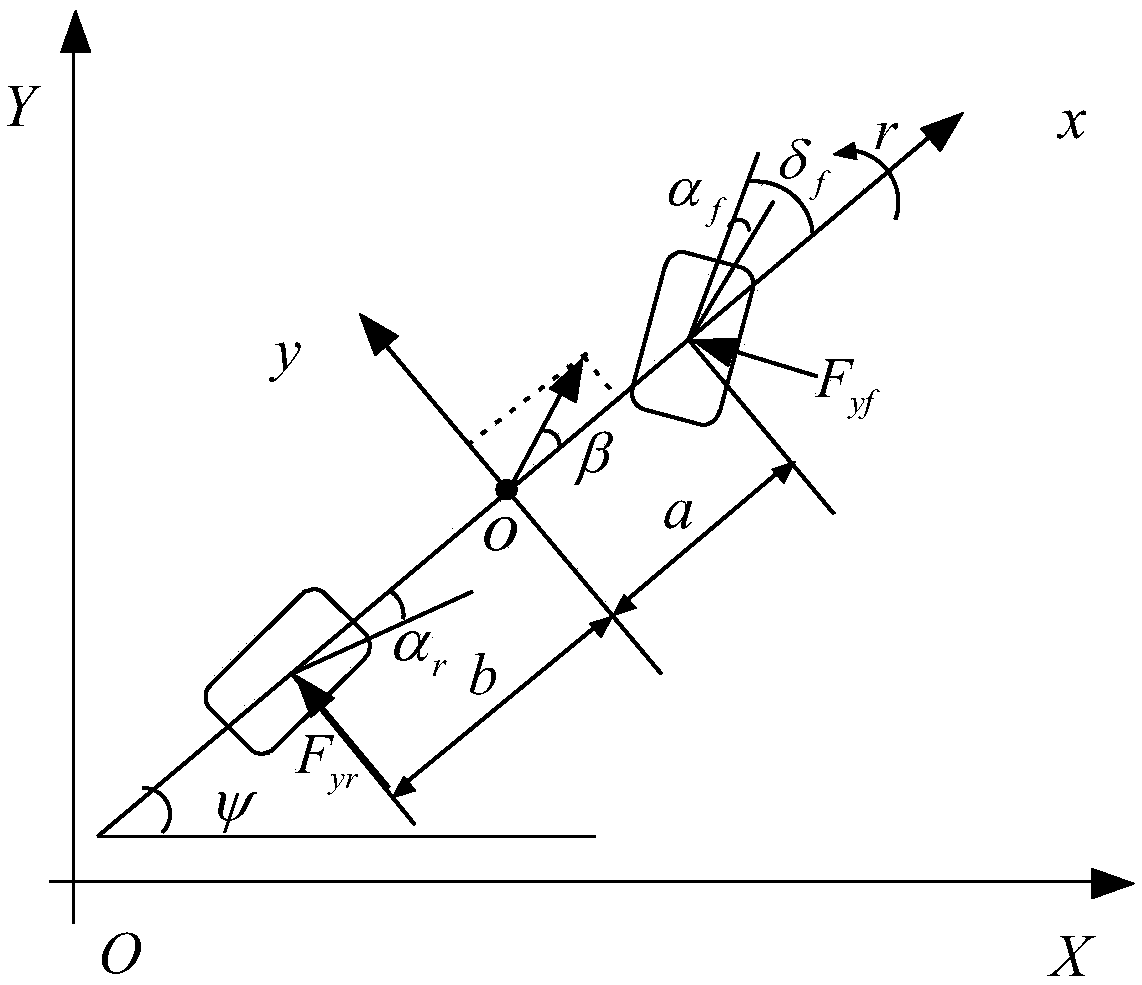
[0087] vehicle model such as figure 2 As shown, according to the relationship between dynamics and kinematics, the following expression can be obtained:
[0088]
[0089] Among them, β is the sideslip angle of the center of mass, unit, rad; v is the longitudinal velocity at the center of mass of the vehicle, unit, m / s; ψ is the yaw angle of the vehicle, unit: rad; r is the yaw angular velocity of the vehicle, unit, rad / s; C f is the cornering stiffness of the front tires of the vehicl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More