Angular platform parallel mechanism with RSR branched chains
A corner table and parallel technology, applied in the field of robots, can solve the problems of complex manufacturing process, difficult control and high precision, and achieve the effects of high bearing stiffness, high precision and strong dexterity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
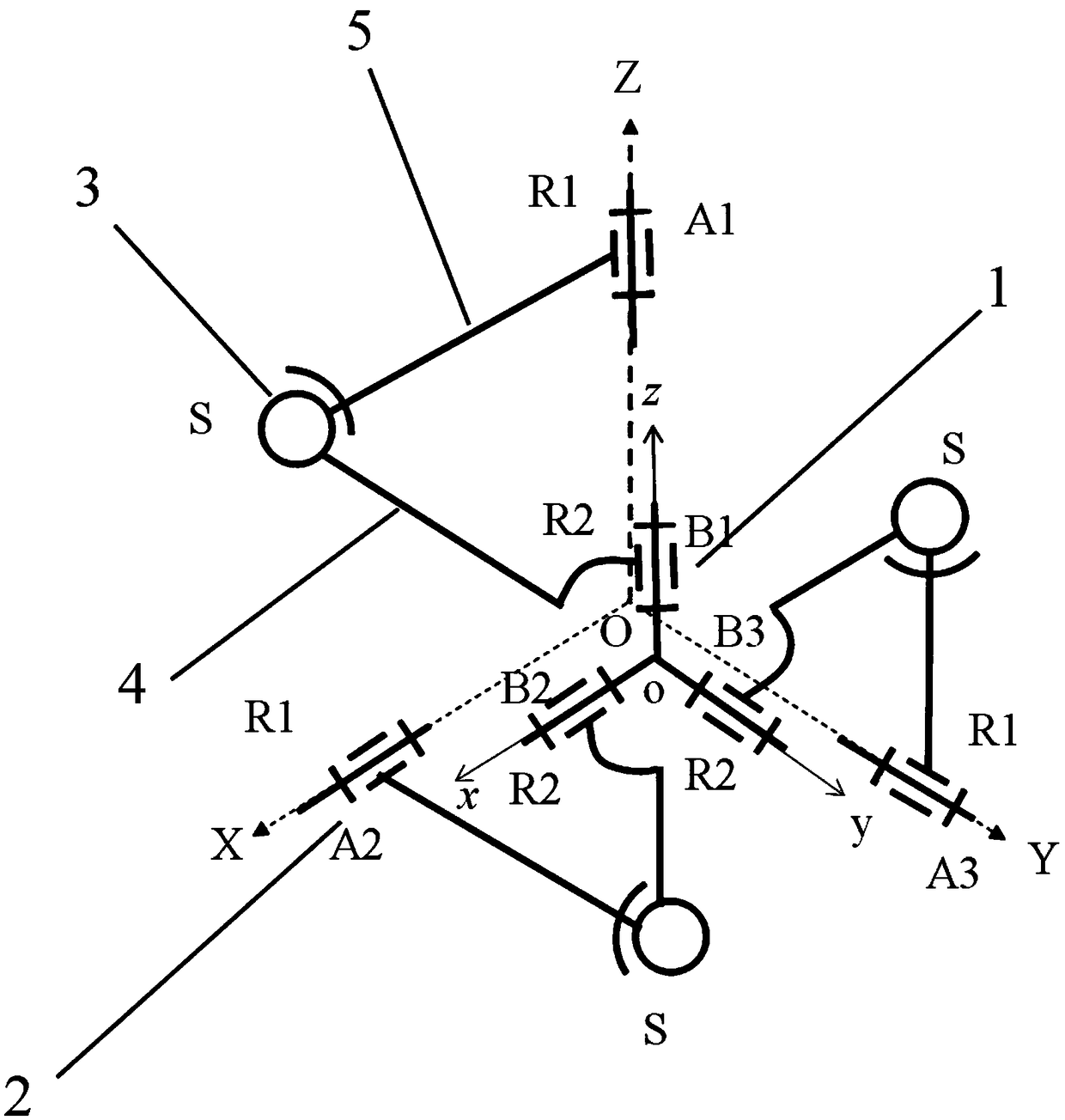
[0012] The angle platform parallel mechanism with RSR branch chain of the present invention, as figure 1 As shown, it includes a moving platform 1 in the shape of a cube corner truss and a fixed platform 2 in the shape of a cube corner truss. The moving platform 1 is connected to the fixed platform 2 through three branch chains to form a cube.
[0013] The moving platform 1 includes B1, B2 and B3, and B1, B2 and B3 are respectively located on three mutually perpendicular axes intersecting at one point. The fixed platform 2 includes A1, A2 and A3, and A1, A2 and A3 are respectively located on three intersecting axes. Three axes that are perpendicular and intersect at a point.
[0014] Each branch chain includes a rotating pair R1 connected with the fixed platform 1, the rotating pair R1 is connected with the ball pair S3 through the first con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com