

A Shortest Path Planning Method Based on Unidirectional Search Model
A shortest path and model technology, applied in the directions of road network navigators, navigation, instruments, etc., can solve problems such as difficulty in meeting the requirements of fast path planning, huge data files, and reduced algorithm operation efficiency, achieving a small number of search nodes and computing The effect of high efficiency and improved computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below with reference to the accompanying drawings and examples.
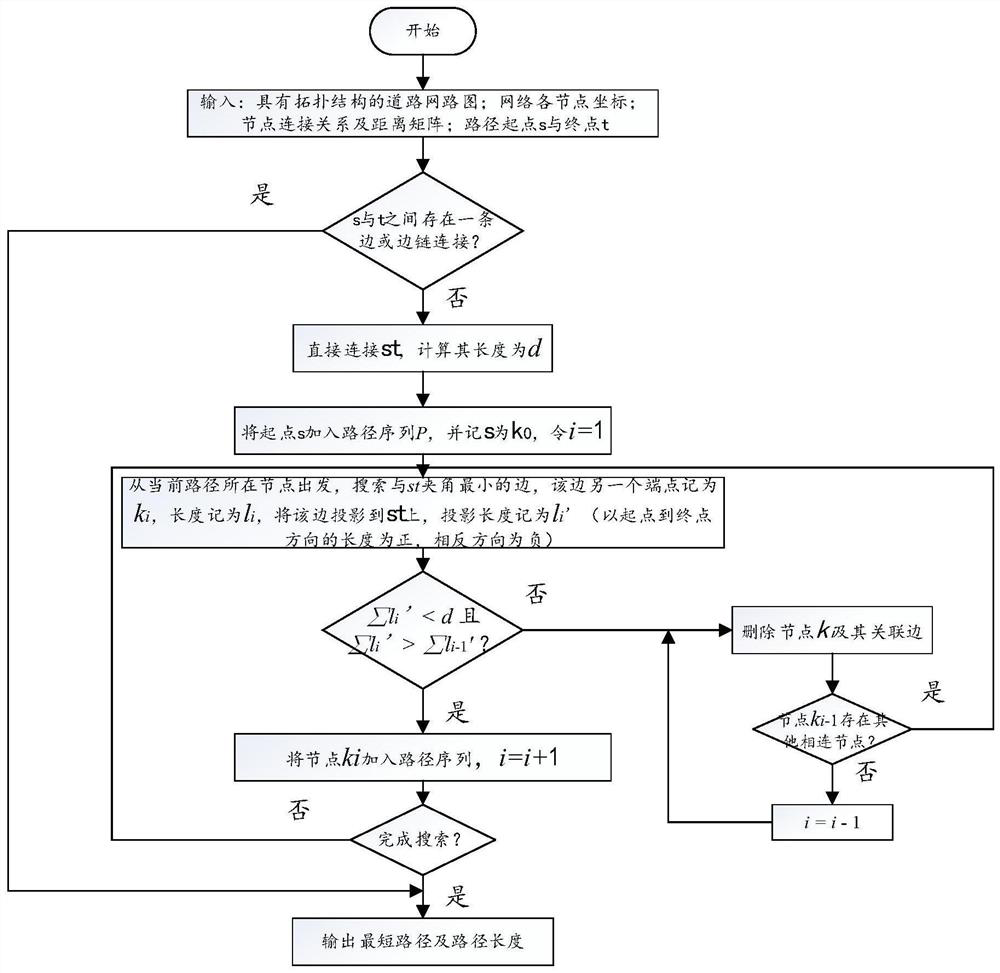
[0030] The present invention provides a shortest path planning method based on a unidirectional search model, such as figure 1 As shown, it can quickly solve the shortest path in the road network under the condition of given start point and end point, and has good real-time performance.
[0031] The input is a road network graph with a topological structure, which includes the coordinates of each node in the network, a weight matrix representing the connection relationship and distance of each node; or specify the nodes that must be passed or the roads that are prohibited.
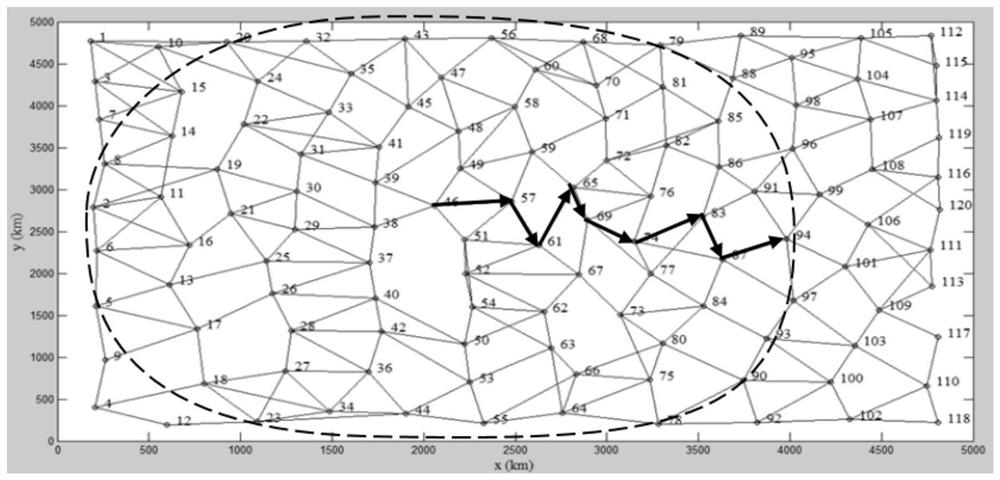
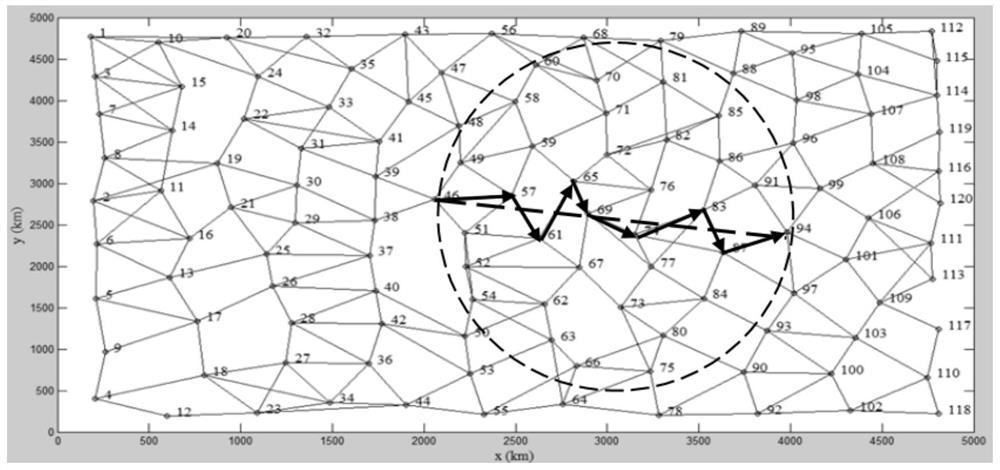
[0032] In this example, a medium-scale road network diagram with 120 nodes is selected, and a shortest path planning method based on a one-way search model is described in detail. road network diagram Figure 4 As shown, the starting point is defined as node 16, and the end point is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More