

A Quadrotor Trajectory Tracking Control Method Based on Nonlinear Guidance
A technology of a quadrotor aircraft and a control method, which is applied in the field of aircraft control and can solve the problems that the quadrotor aircraft cannot guarantee a uniform flight and have a large response delay.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
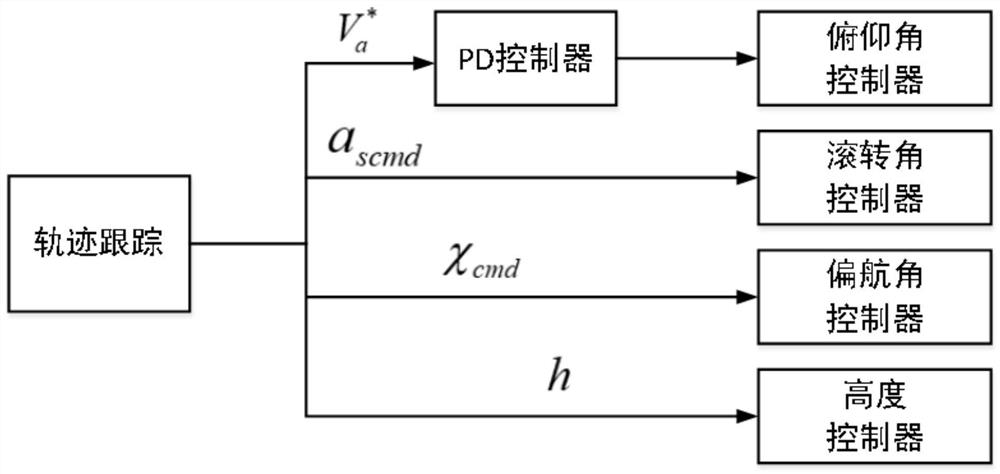
[0093] Specific implementation mode one: combine image 3 The present embodiment is described. A non-linear guidance-based quadrotor trajectory tracking control method provided in this embodiment specifically includes the following steps:
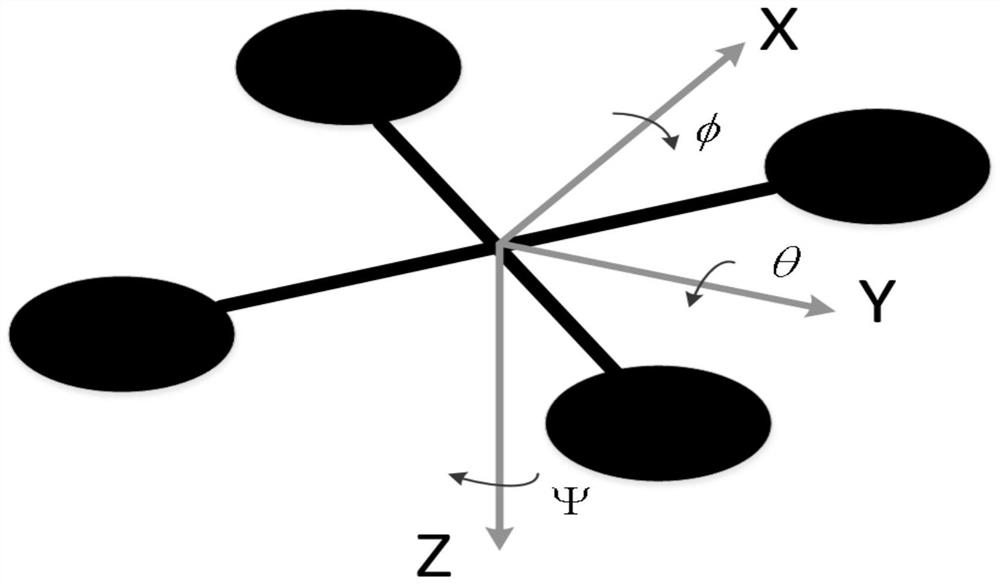
[0094] Step 1. Establish a straight-line path coordinate system, a circular arc path polar coordinate system, and an inertial coordinate system OXYZ for the quadrotor aircraft;
[0095] Step 2, calculating the height required for the quadrotor aircraft to track the trajectory according to the geometric relationship;
[0096] Step 3: Project the quadrotor aircraft position, expected path, and current path onto the XOY plane of the inertial coordinate system, select a virtual tracking point on the projection of the expected path, and use the position coordinates of the virtual tracking point to calculate: the current speed of the quadrotor aircraft The angle between the direction and the line connecting the position of the quadrotor aircraft...
specific Embodiment approach 2
[0100] Specific embodiment two: the difference between this embodiment and specific embodiment one is that the specific process of establishing the linear path coordinate system, arc path polar coordinate system and inertial coordinate system described in step one includes:
[0101] Establish a straight-line path coordinate system for the quadrotor aircraft o p x p the y p z p , arc path polar coordinate system C ρ N ρ P ρ And the inertial coordinate system OXYZ, defining the straight line path coordinate system o p x p the y p z p The origin of the coordinates is the starting point of the straight line path, and its o p x p The axis points in the direction of the straight path, o p z p The axis pointing is the same as the inertial coordinate system OZ axis pointing, o p the y p axis, o p x p axis, o p z p The axes form a right-handed coordinate system; from the inertial coordinate system OXYZ to the straight path coordinate system o p x p the y p z p The...
specific Embodiment approach 3
[0106] Specific embodiment three: the difference between this embodiment and specific embodiment two is that the specific process of calculating the height required for the quadrotor aircraft tracking trajectory described in step two includes:
[0107] A1. When the tracking track is a straight line path:
[0108] The relative deviation of the position of the quadrotor relative to the position of the straight path e p at o p x p the y p z p In the coordinate system, it can be expressed as:
[0109]
[0110] Among them, e px 、e py 、e pz Respectively represent e p at o p x p the y p z p x in the coordinate system p Axial component, y p Axial component, z p The component of the axis direction, r is the desired position vector of the quadrotor, and p is the current position vector of the quadrotor;
[0111] In order to obtain the desired height h, such as Figure 4 As shown, the relative deviation e p Projected into the vertical plane (YOZ plane) in the inertia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More