

Five degrees of freedom parallel robot
A technology of robot and degree of freedom, applied in the field of robotics, can solve problems such as insufficient rigidity and large working space, and achieve the effect of easy movement, large mechanism rigidity and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
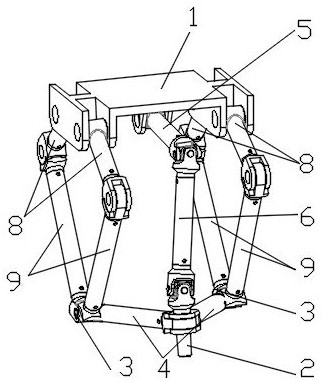
[0013] Such as figure 1 As shown, a five-degree-of-freedom parallel robot includes a fixed platform 1 and a moving platform 2 . Two planar link mechanisms are arranged symmetrically on both sides of the fixed platform 1 , the output end 3 of the planar link mechanism is hinged to the spherical rod 4 , and the other end of the spherical rod 4 is hinged to the movable platform 2 . An intermediate driving mechanism is arranged in the middle of the fixed platform 1, and the two ends of the intermediate driving mechanism are respectively hinged with the fixed platform 1 and the moving platform 2. The two planar linkage mechanisms are arranged in parallel; the middle drive mechanism is arranged on the symmetrical center plane. In this way, the output ends of the two planar linkage mechanisms have the same movement structure, the mechanism has a large rigidity, a simple structure, and the movement is easy to realize. The output end of the planar linkage mechanism has 3 degrees of f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More