

Primate bionic robot gripper driven by pneumatic muscles
A pneumatic muscle and robotic hand technology, applied in the field of bionic robots, can solve the problems of reduced closing speed of the gripper, small output torque of the steering gear, deviation of the motor-driven gripper, etc., and achieves improved closing speed, improved gripping torque, and avoidance of The effect of own weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
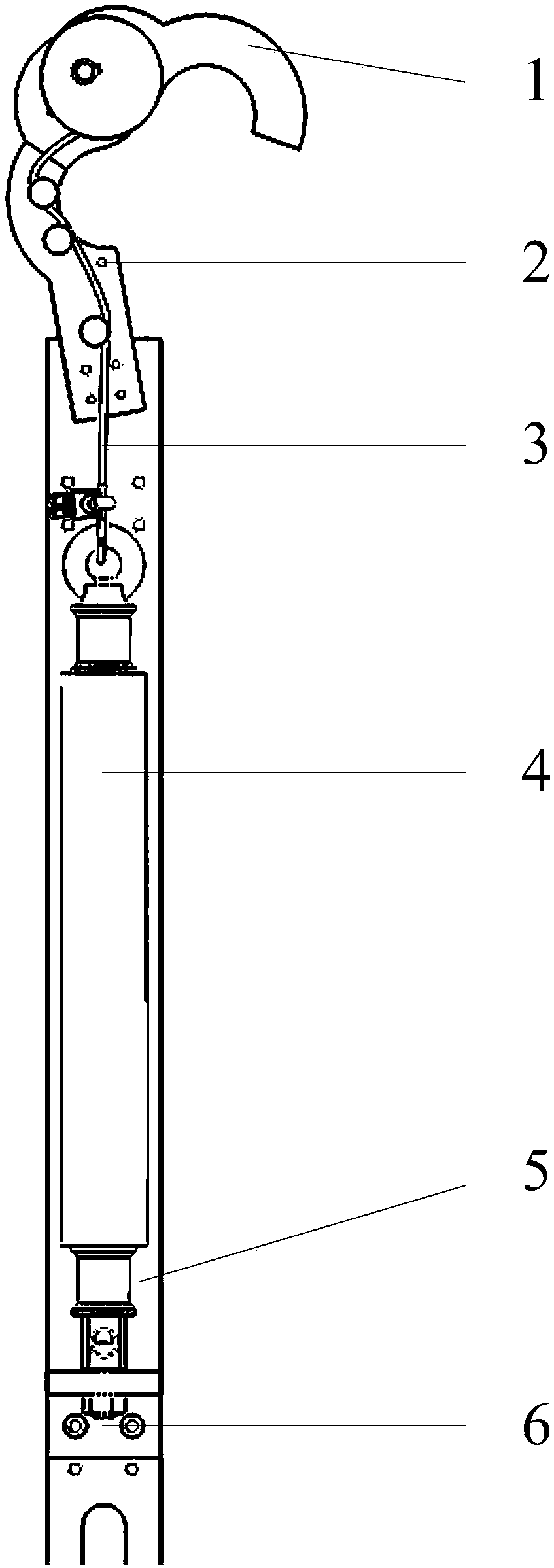
[0025] like Figure 1 to Figure 6 As shown, a pneumatic muscle-driven primate bionic robot gripper includes an upper arm 5 , an upper joint 1 of the gripper, a lower joint 2 of the gripper, a pneumatic muscle 4 , a wire rope 3 , a torsion spring 8 and a pneumatic muscle mount 6 .
[0026] The lower end of the upper arm 5 is fixed with the pneumatic muscle mount 6, and its upper end is connected with the lower joint 2 of the paw, and the upper joint 1 of the paw is connected with the lower joint 2 of the paw.
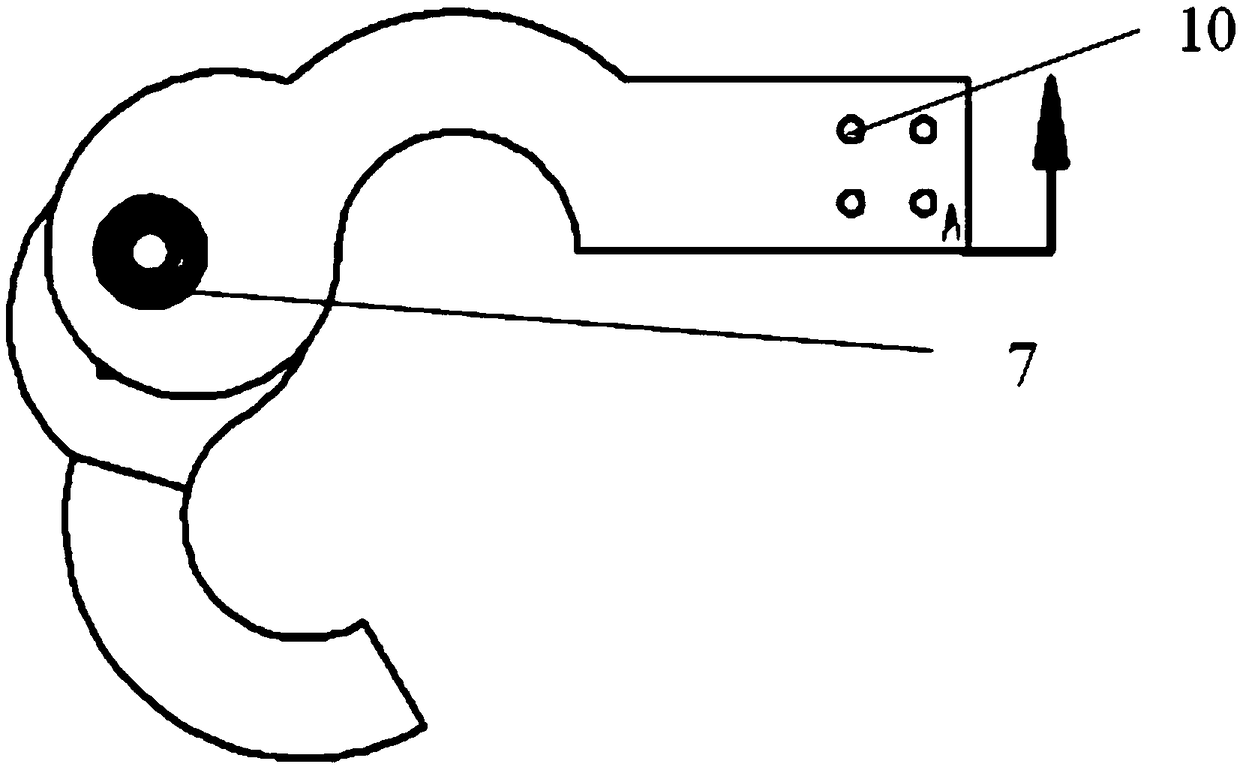
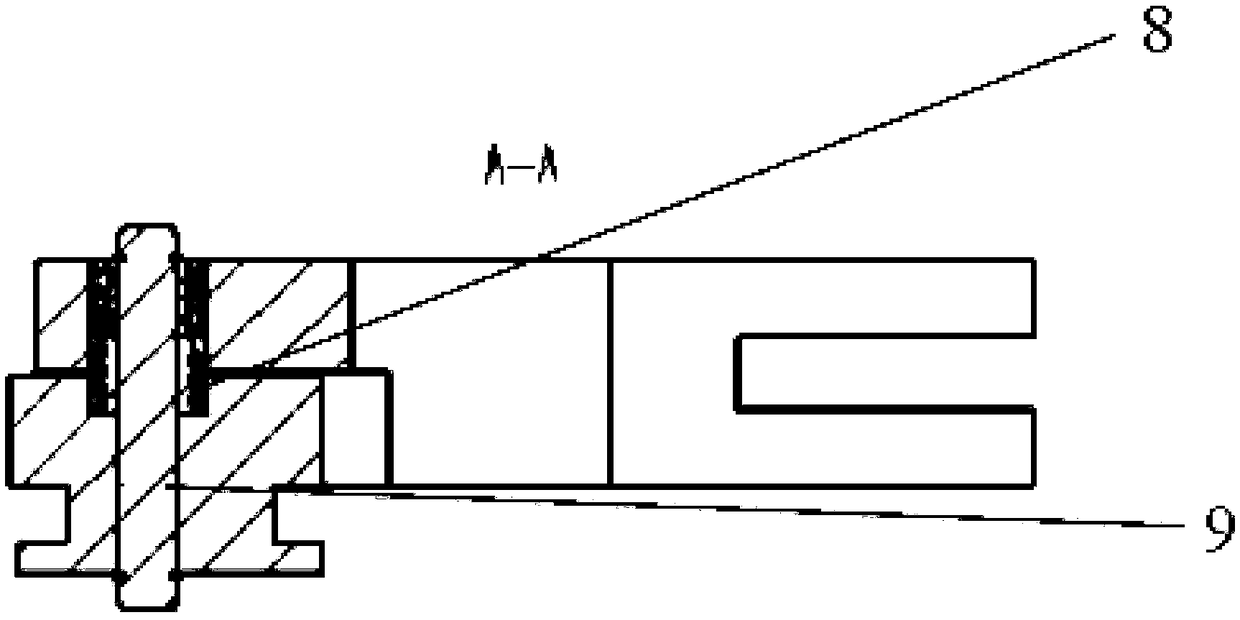
[0027] The pneumatic muscle mounting seat 6 is connected with the steel wire rope 3 through the pneumatic muscle 4; the steel wire rope 3 bypasses the groove 13 on the upper joint 1 of the gripper, and its end is fixed on the threaded hole A12 on the groove 13, and the groove 13 constrains the direction of the steel wire rope 3 .
[0028] The upper joint 1 of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More