

Displacement-crawler-type pipe dredging robot
A crawler and robot technology, applied to tracked vehicles, motor vehicles, waterway systems, etc., can solve the problems of high difficulty in dredging, heavy manual workload, and low dredging efficiency, and achieve simple and reliable structure, high mechanical efficiency, Improve the effect of system energy saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
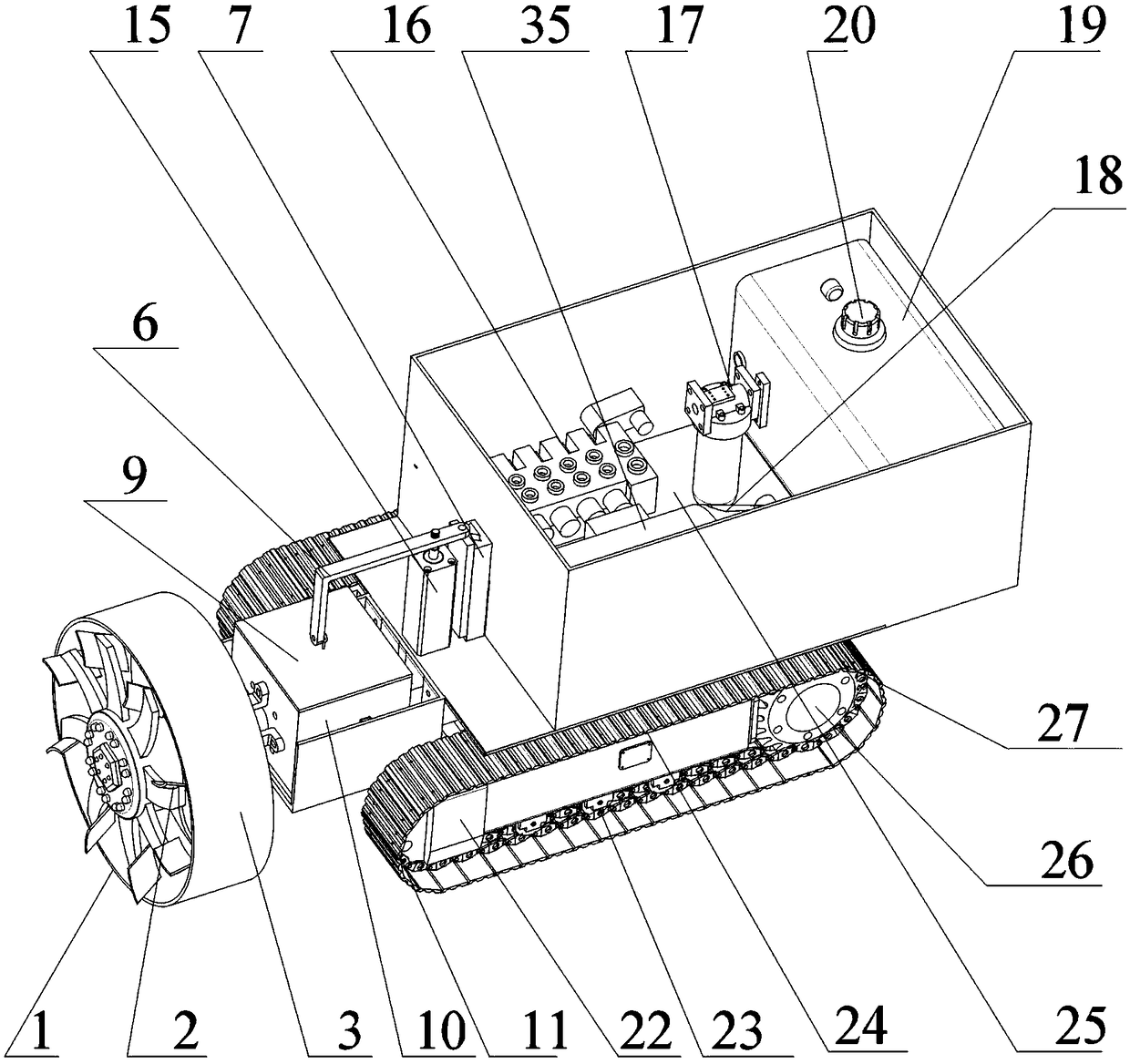
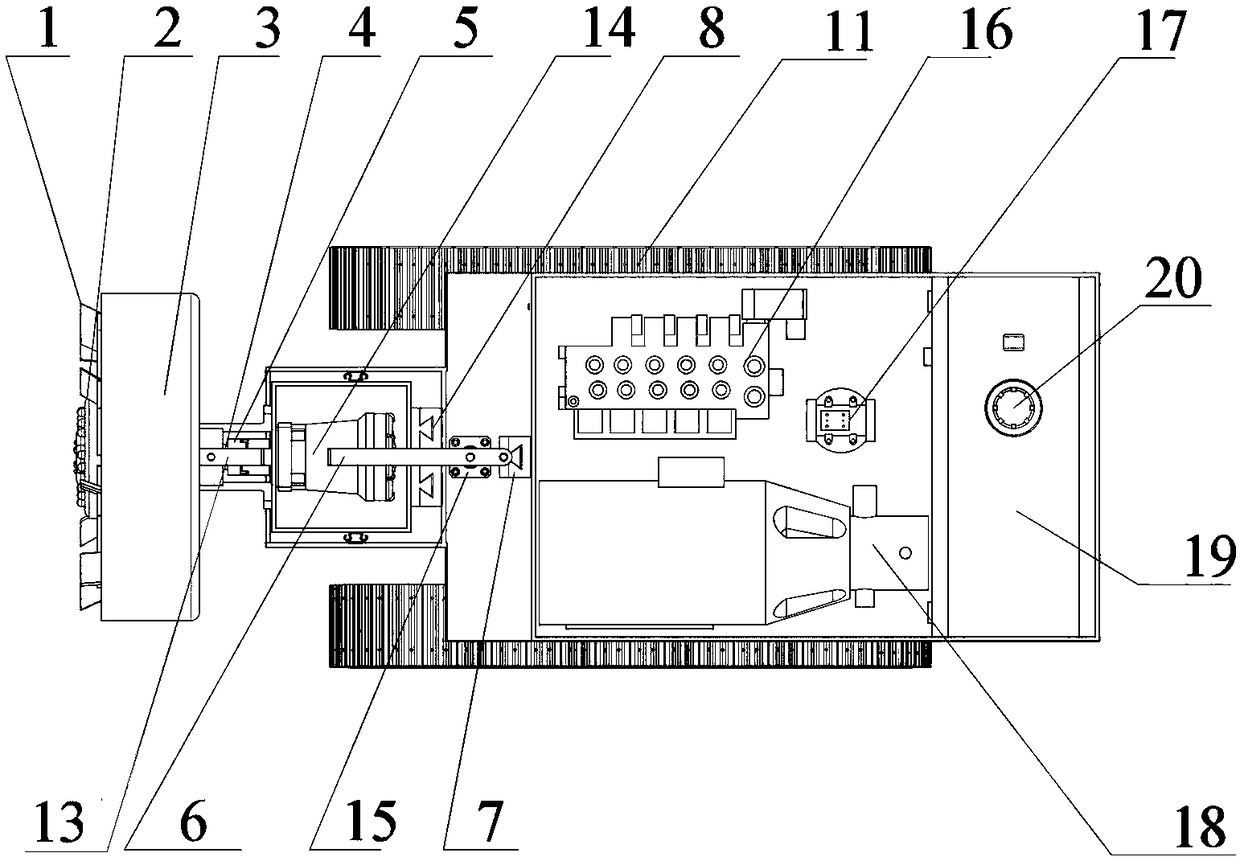
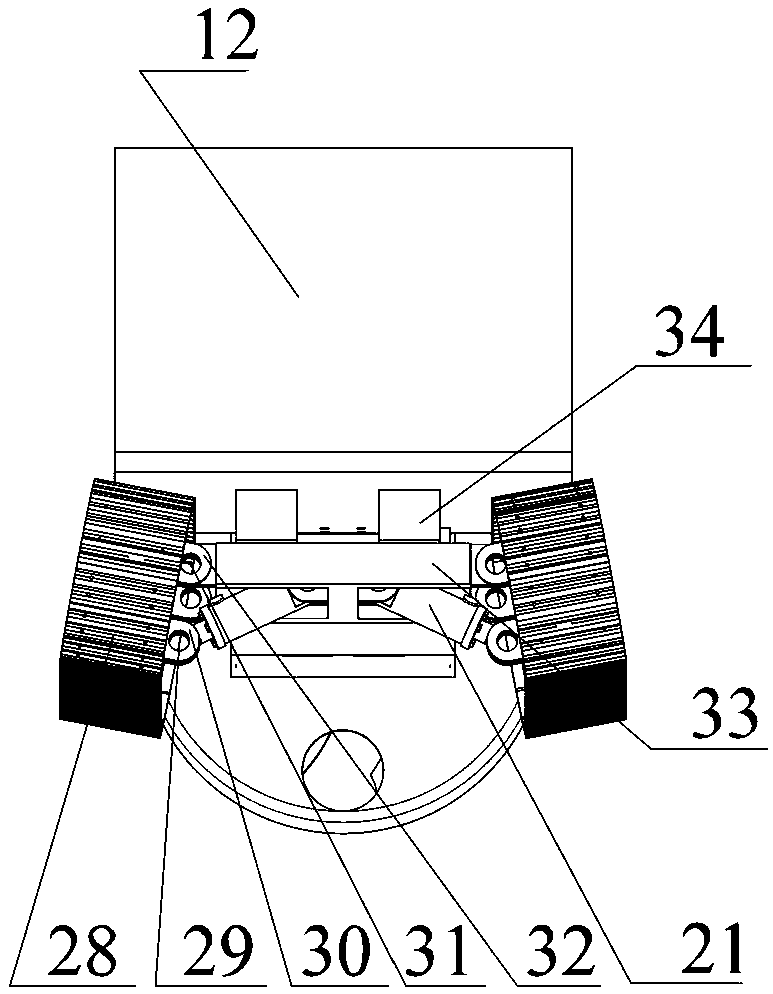
[0025] Please refer to Figure 1 ~ Figure 3 , the embodiment of the present invention provides a displacement crawler type pipeline dredging robot, the robot is designed in the form of a carrier, including: a dredging reamer mechanism 1 acting on the wall of the drainage pipeline, used to adjust the The reamer lifting mechanism 9 at the position of the dredging reamer mechanism, the displacement type crawler chassis that can adjust the inclination angle of the crawler belt, and the hydraulic mechanism 25 that provides power for the robot.
[0026] The dredging reamer mechanism 1 is arranged at the front end of the car body. The dredging reamer mechanism 1 includes a reamer 2, a circular bucket 3 and a first hydraulic motor 14. The first hydraulic motor i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More