

Robot behavior control method based on virtual reality
A control method and virtual reality technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems that cannot be widely applied to various tasks and robot platforms, require high network transmission bandwidth, and low real-time performance, etc., and achieve fast Efficient path planning, simple implementation method, and improved application flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
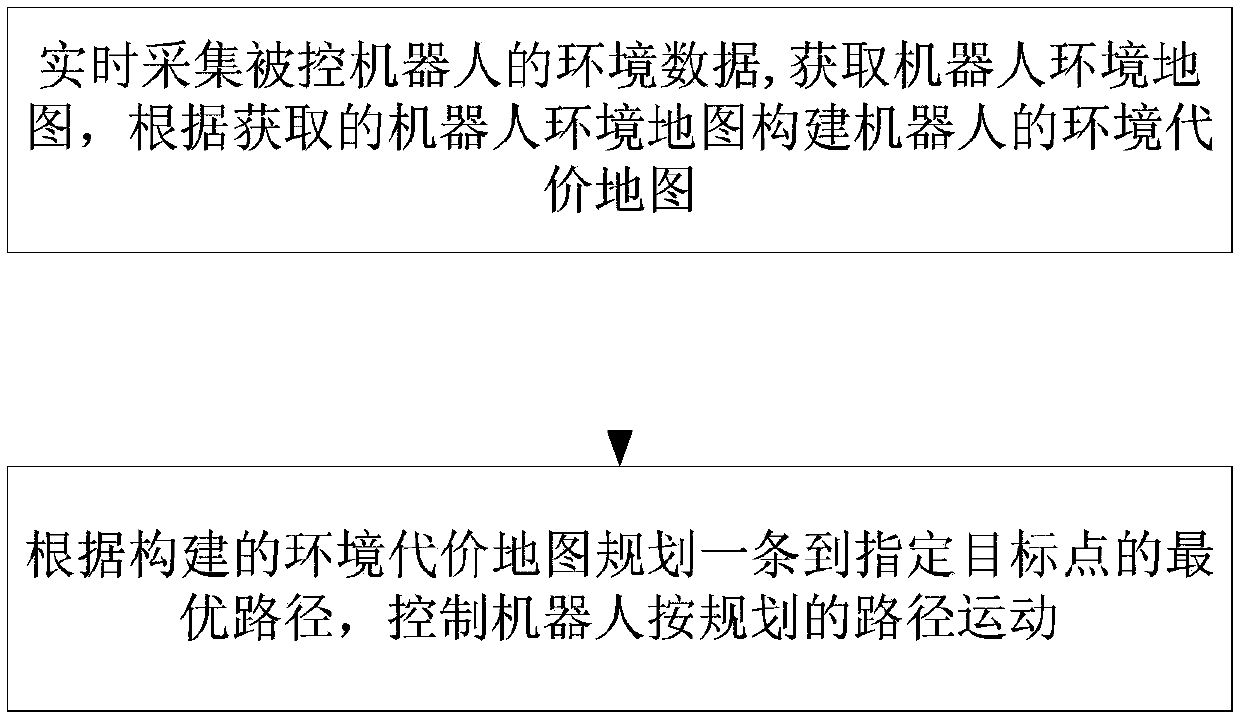
[0041] like figure 1 As shown, the robot behavior control method based on virtual reality in this embodiment, the steps include:
[0042] S1. After collecting the environmental data of the controlled robot in real time to obtain the robot's environmental map, construct the robot's environmental cost map according to the acquired robot's environmental map;
[0043] S2. Plan an optimal path to the designated target point according to the constructed environmental cost map, and control the robot to move according to the planned path.
[0044] This embodiment is based on virtual reality technology, by constructing the environmental cost map of the robot in real time, and planning an optimal path to a designated target point according to the environmental cost map, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More