

Underactuation finger mechanism androdlike fruit and vegetable holding type picking mechanical arm end effector
An underactuated and actuator technology, which is applied in the field of the end effector of the rod-shaped fruit and vegetable gripping picking manipulator, can solve the problems of large use limitations, damage to fruits and vegetables, and inability to adapt to a variety of fruits and vegetables.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solutions of the present invention will be described below in conjunction with the accompanying drawings. Obviously, the following embodiments are not all embodiments of the present invention. Based on the described embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without other creative efforts fall within the protection scope of the present invention. In addition, the technical features involved in the different embodiments of the present invention described below may be combined with each other as long as there is no conflict with each other.
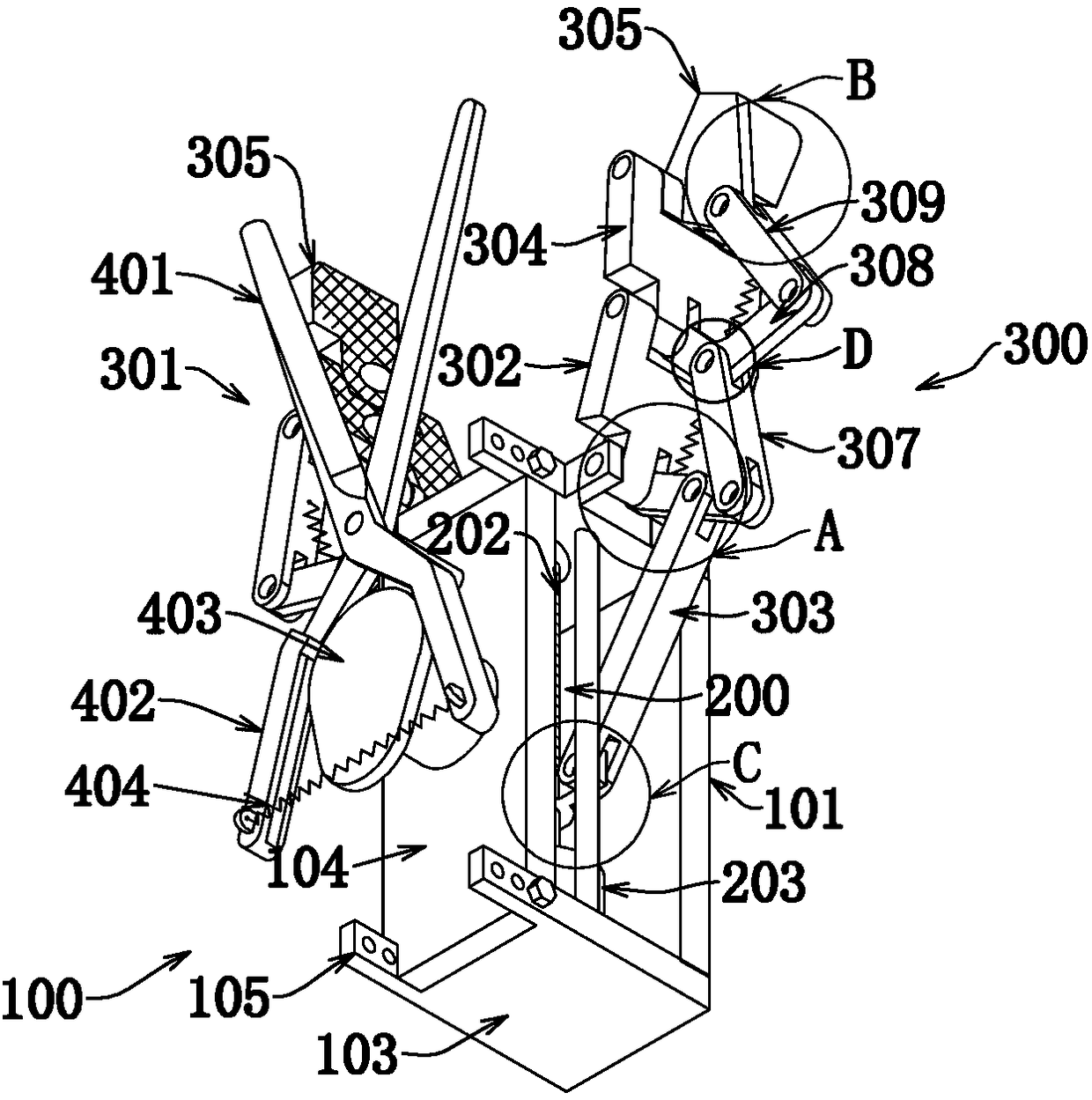
[0031] Such as figure 1 As shown, the frame 100, the frame 100 includes a lower support plate 101 and front and rear support plates 102, 103 positioned at both ends of the lower support plate 101 and vertically fixedly arranged, and the two sides of the front support plate 102 are used for hinged installation The underactuated finger mechanism 300, that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More