

A deformable spatial manipulation arm
A manipulator and space technology, applied in the field of deformable space manipulators, can solve the problems of inability to rotate three-dimensional manoeuvres at the same time, reduce the degree of freedom of the claw flaps, and the complex structure of manipulators, so as to achieve spatial displacement changes and reduce self-freedom. degree, the effect of increasing flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
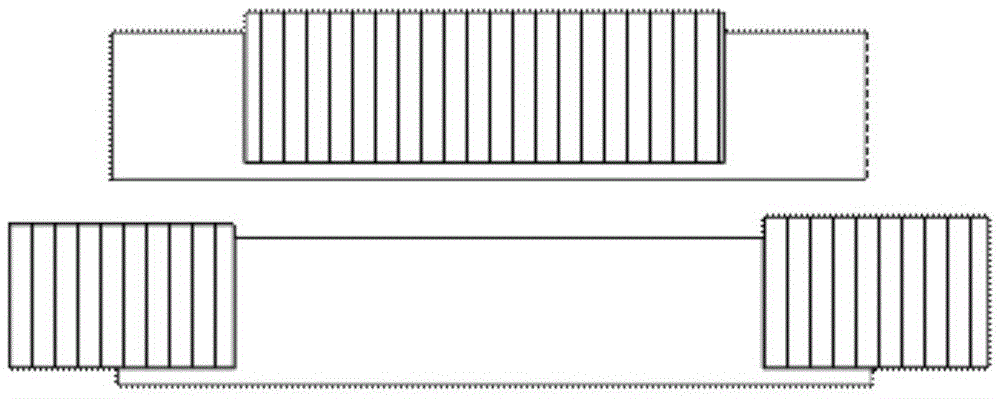
[0031] figure 1 It is a schematic diagram of the structure of the deformable spatial manipulation arm in the preferred embodiment of the present invention. It can be seen from the figure that it includes a fixed length rod 1, a telescopic rod 3, a rod bionic joint 2, a mechanical claw assembly 5, a base 4, a rotating shaft 12 and slide lock10. The length of the telescopic rod 3 can be adjus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More