

Multi-shaft robot forward kinematics computing method based on shaft invariant
A multi-axis robot and forward kinematics technology, applied in the field of robotics, can solve the problems of lack of design framework calculation and control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to more clearly illustrate the technical scheme of the present invention, and cannot limit the protection scope of the present invention with this.
[0085] Definition 1. Natural coordinate axis: The unit reference axis that is coaxial with the motion axis or measurement axis and has a fixed origin is called the natural coordinate axis, also known as the natural reference axis.
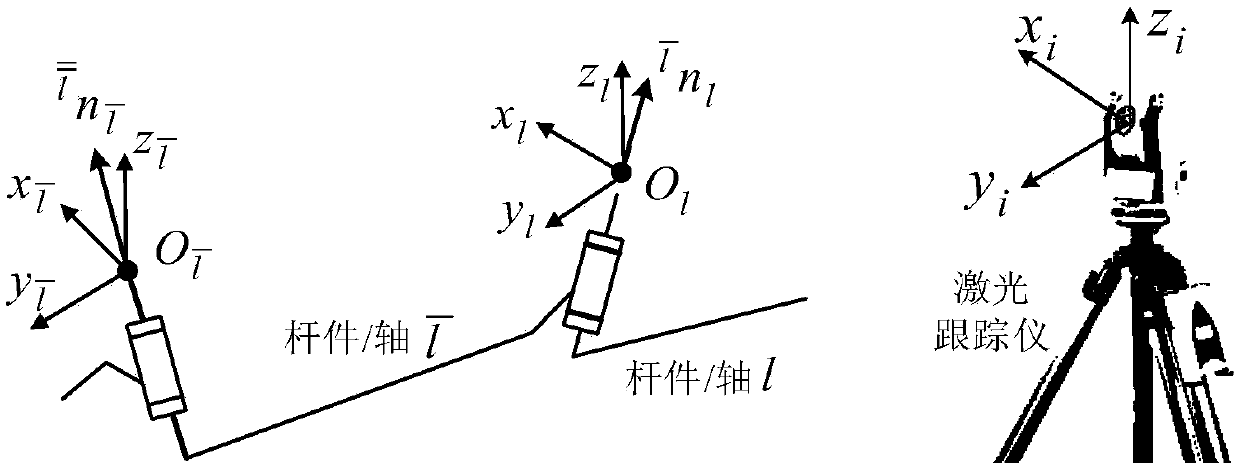
[0086] Definition 2 natural coordinate system: such as figure 1 As shown, if the multi-axis system D is at zero position, all Cartesian body coordinate systems have the same direction, and the origin of the body coordinate system is located on the axis of the motion axis, then the coordinate system is a natural coordinate system, referred to as the natural coordinate system.
[0087] The advantages of the natural coordinate system are: (1) the coordinate sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More