

Method, device and apparatus for estimating point cloud object attitude based on deep learning
A pose estimation and deep learning technology, applied in the field of computer vision, can solve the problems of low accuracy of object pose, affecting accuracy, and complicated process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
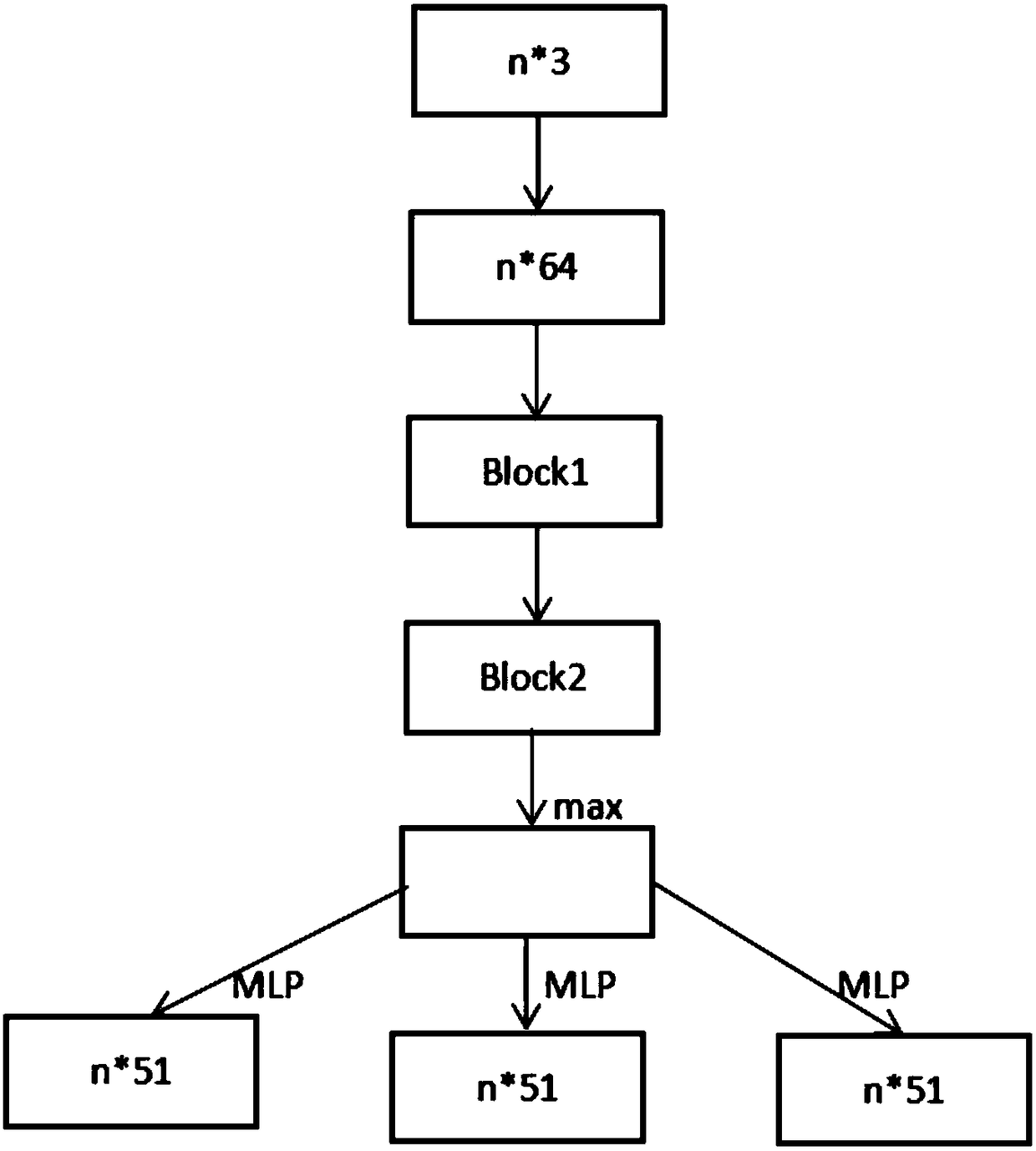
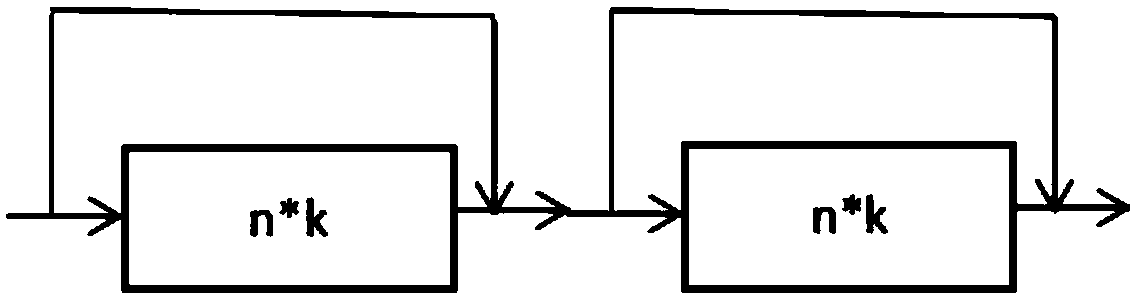
[0091] The present invention provides a point cloud object pose estimation method based on deep learning, please refer to figure 1 , Which is a model diagram of a point cloud object pose evaluation method based on deep learning proposed by an embodiment of the present invention. See Figure 2 to Figure 7 , The method described in the embodiment of the present invention specifically includes the following steps:
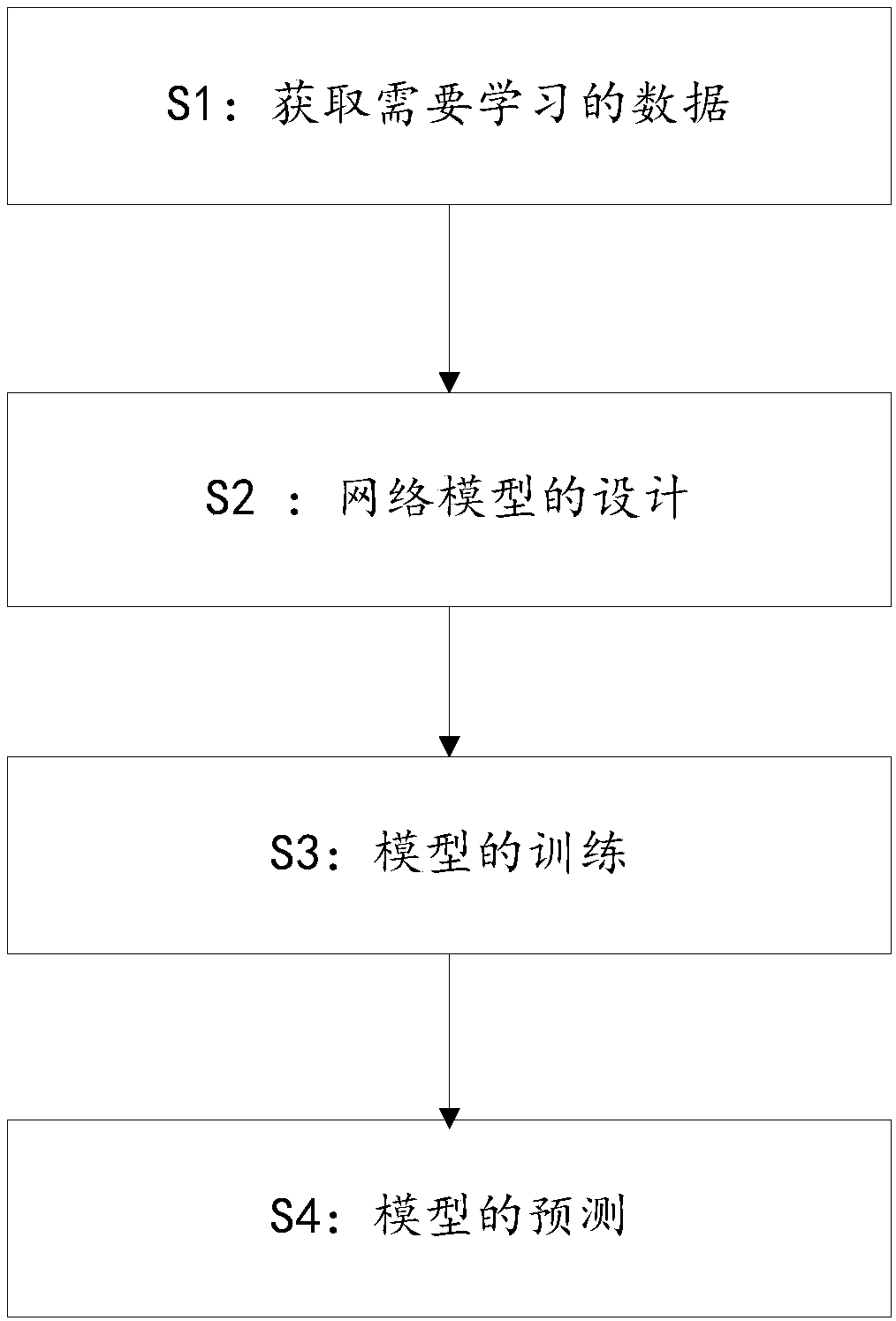
[0092] S1: Obtain the data that needs to be learned, including the following steps:
[0093] S11. Select point cloud object files from the data set;
[0094] Specifically, a point cloud object file is selected from the public data set ModelNet40 (http: / / modelnet.cs.princeton.edu).
[0095] S12. Convert the selected point cloud object file .off file type to .obj file type;
[0096] Specifically, the point cloud object file .off file type selected in S11 is converted to the interface (off2obj command) provided by the Antiprism (www.antiprism.com group of programs used to create...
Embodiment 2
[0178] The application of the method for estimating the posture of a point cloud object based on deep learning described in the foregoing embodiment will be described in detail below with reference to specific cases.
[0179] S201. Select an original point cloud object file ending with .off from ModelNet40, and convert the .off file type into an .obj file type through the Antiprism code.
[0180] S202. Import the .obj file data through the blender software, and use the code to rotate the imported data at an interval of -25 degrees to 25 degrees by 1 degree, taking into account the independence of the X axis, Y axis, and Z axis to produce 51*51* 51 (51 is the number of categories that the network model needs to predict and classify for each axis rotation angle) a total of 130,000 data files with different rotation angles.
[0181] In this embodiment, the sparse point cloud and the dense point cloud, the rotation data generation scheme of the symmetric object and the asymmetric object ...
Embodiment 3
[0200] The embodiment of the present invention also provides a point cloud object pose estimation device based on deep learning, please refer to Figure 8 The device includes a data acquisition module 10 for mutual data interaction, a network model design module 20, a model training module 30, and a model prediction module 40.
[0201] The data acquisition module 10 is used to acquire data that needs to be learned.
[0202] The data acquisition module 10 includes a data selection unit 101, a file type conversion unit 102, an angle rotation saving unit 103, a file sorting unit 104, and a file dividing unit 105.
[0203] The data selection unit 101 is configured to select point cloud object files from a data set;
[0204] Specifically, a point cloud object file is selected from the public data set ModelNet40 (http: / / modelnet.cs.princeton.edu) through the data selection unit 101.
[0205] The file type conversion unit 102 is used to convert the selected point cloud object file .off file ty...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More