

Ultra-precision motion system feedforward controller parameter tuning method
A feedforward controller and motion system technology, applied in program control, computer control, general control system, etc., can solve problems such as errors, feedforward controllers are difficult to meet ultra-precision motion control, and model parameters are difficult to obtain. The effect of reducing tracking error, reducing settling time, and improving productivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] The following will describe the embodiment of the parameter tuning method for the feedforward controller of the ultra-precision motion system according to the present invention with reference to the accompanying drawings. Those skilled in the art would recognize that the described embodiments can be modified in various ways or combinations thereof without departing from the spirit and scope of the invention. Accordingly, the drawings and description are illustrative in nature and not intended to limit the scope of the claims. Also, in this specification, the drawings are not drawn to scale, and like reference numerals denote like parts.
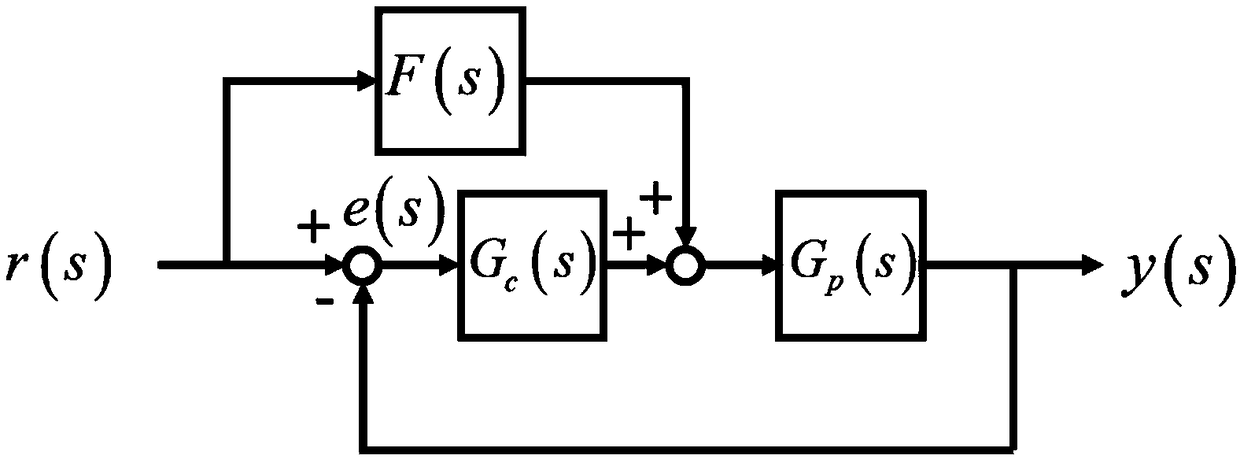
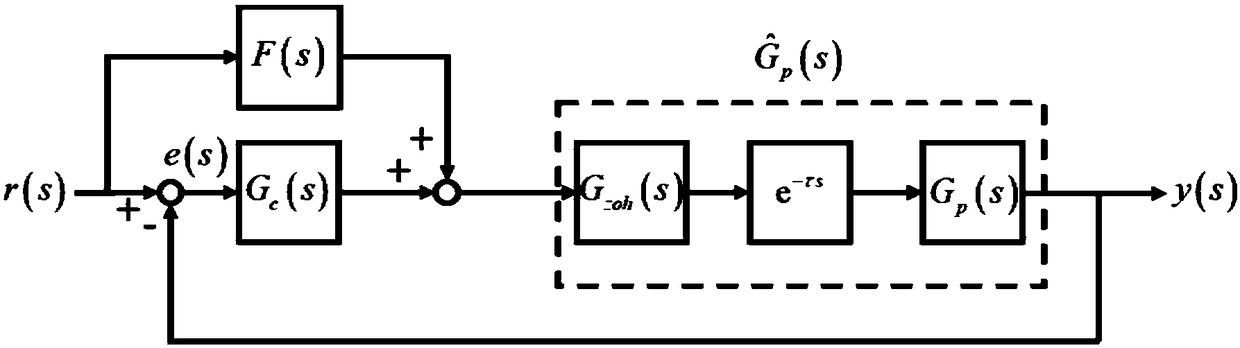
[0065] The ultra-precision motion system feed-forward controller parameter tuning method of this embodiment uses the relationship between the tracking error and the feed-forward controller, the feedback controller, and the reference trajectory to perform the following tuning: the controlled object here refers to the ultra-precision mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More