

Mobile robot path planning method based on improved RRT* algorithm
A mobile robot and path planning technology, applied in the direction of instruments, road network navigators, non-electric variable control, etc., can solve the problems of slowing down the convergence rate, increasing the search time, etc., to reduce randomness, reduce randomness, and improve convergence speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
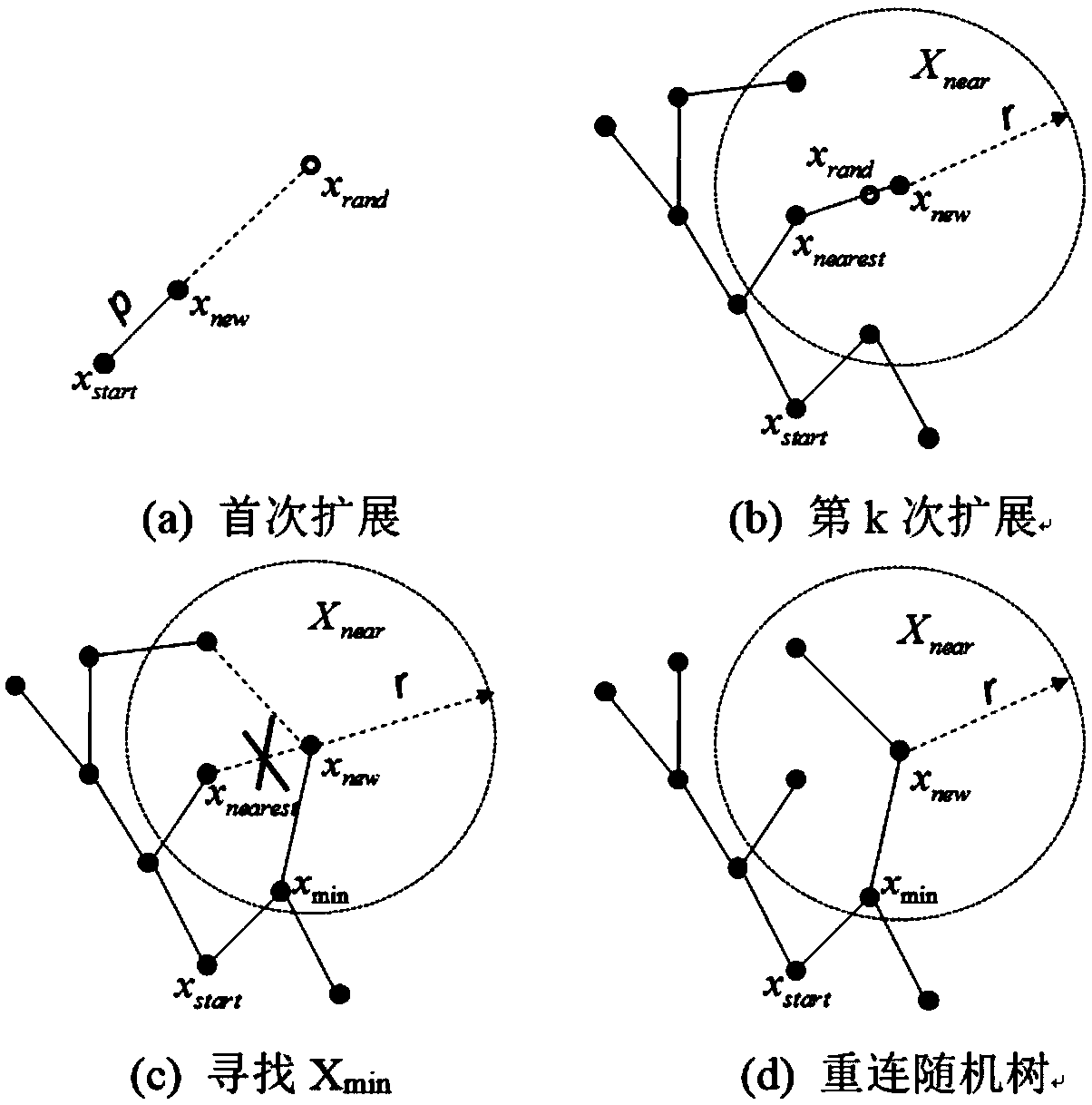
[0053] In order to make the objectives, technical solutions and advantages of the present invention clearer, the technical solutions in the embodiments of the present invention will be described in more detail below in conjunction with the drawings in the embodiments of the present invention. In an embodiment of the present invention, the path planning method includes the following steps:
[0054] (1) Collect the working environment information of the robot through the laser radar sensor, ultrasonic sensor, and infrared sensor that come with the mobile robot, carry out grid map modeling, mark each grid as an obstacle area or an obstacle-free area, and determine the starting point and Target; Figure 4 to Figure 12 In , the black part is the obstacle area, and the white part is the non-obstacle area; the S point is the starting point, and the G point is the target point.
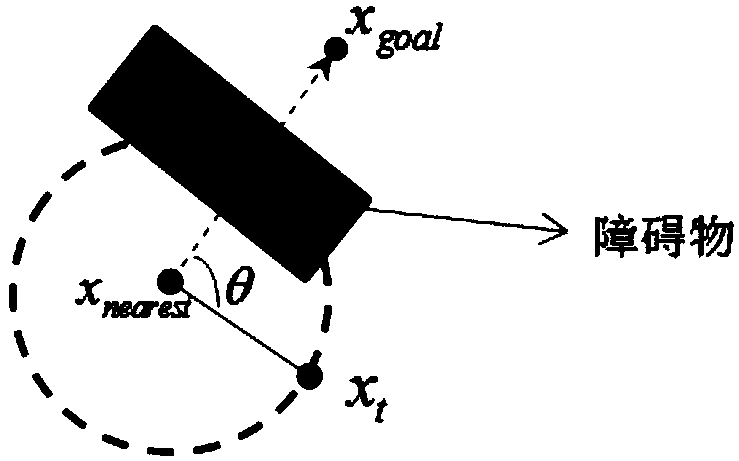
[0055] (2) Use the target paranoid strategy to generate random sampling points in the barrier-free area, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More