

A method for realizing cooperative searching to identify and track a specific target group by multi-intelligent vehicle
A specific target and smart car technology, applied in image data processing, instruments, calculations, etc., can solve the problems of complex topological feature extraction, complex extraction methods, and large amount of calculation, so as to reduce the interference of light and background noise and avoid extraction Effects of inaccuracy, good real-time and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Step 1) Given the target operating domain O and divide it evenly into A regions of the same size, dispatch A smart cars to start searching from the A regions, and the target existence probability of each region is P i,g,k , i=1,2...A, the k represents the current moment, i represents the number of the car, g=g(m,n) represents one of the areas (the (m,n) represents the center coordinates of the area );
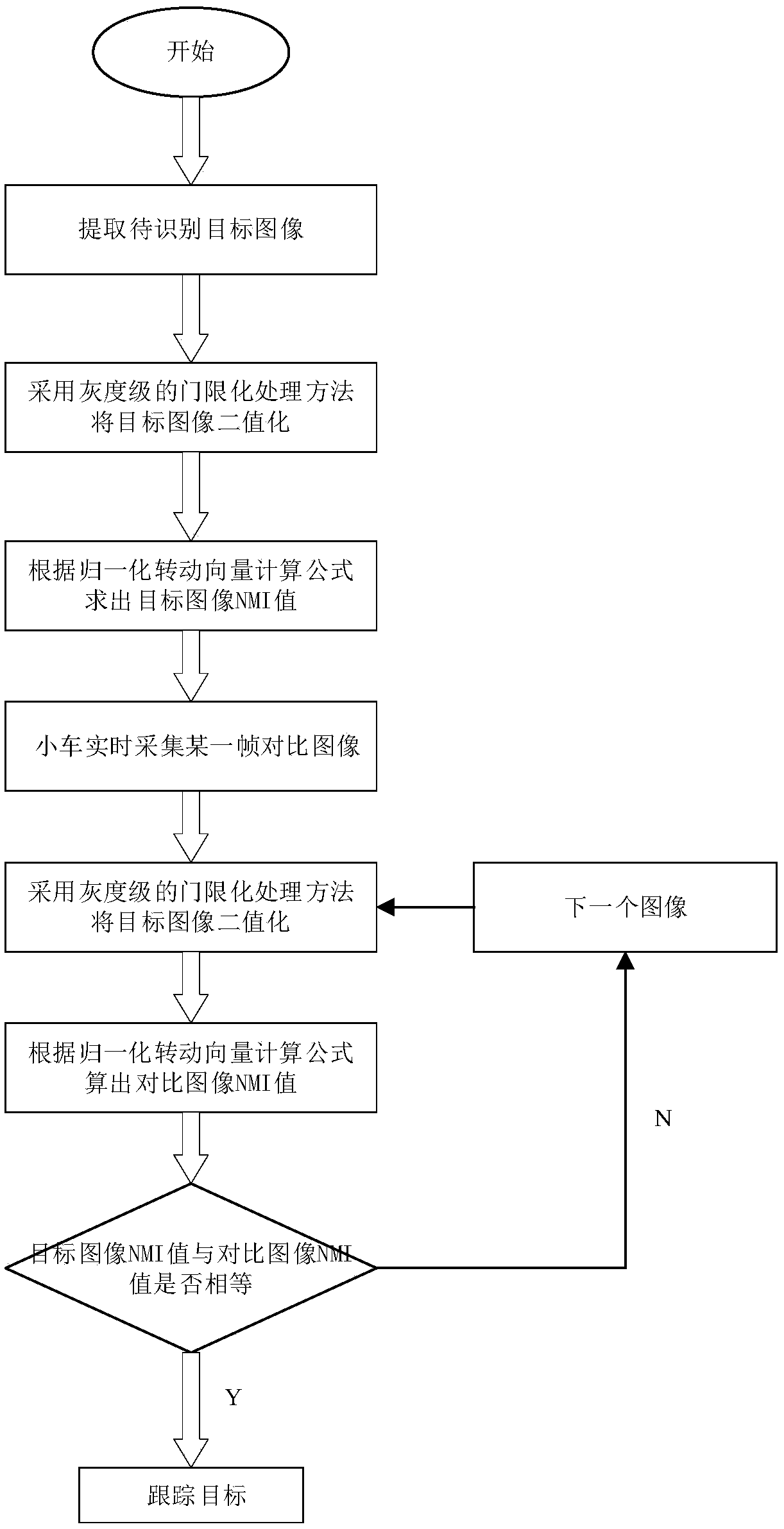
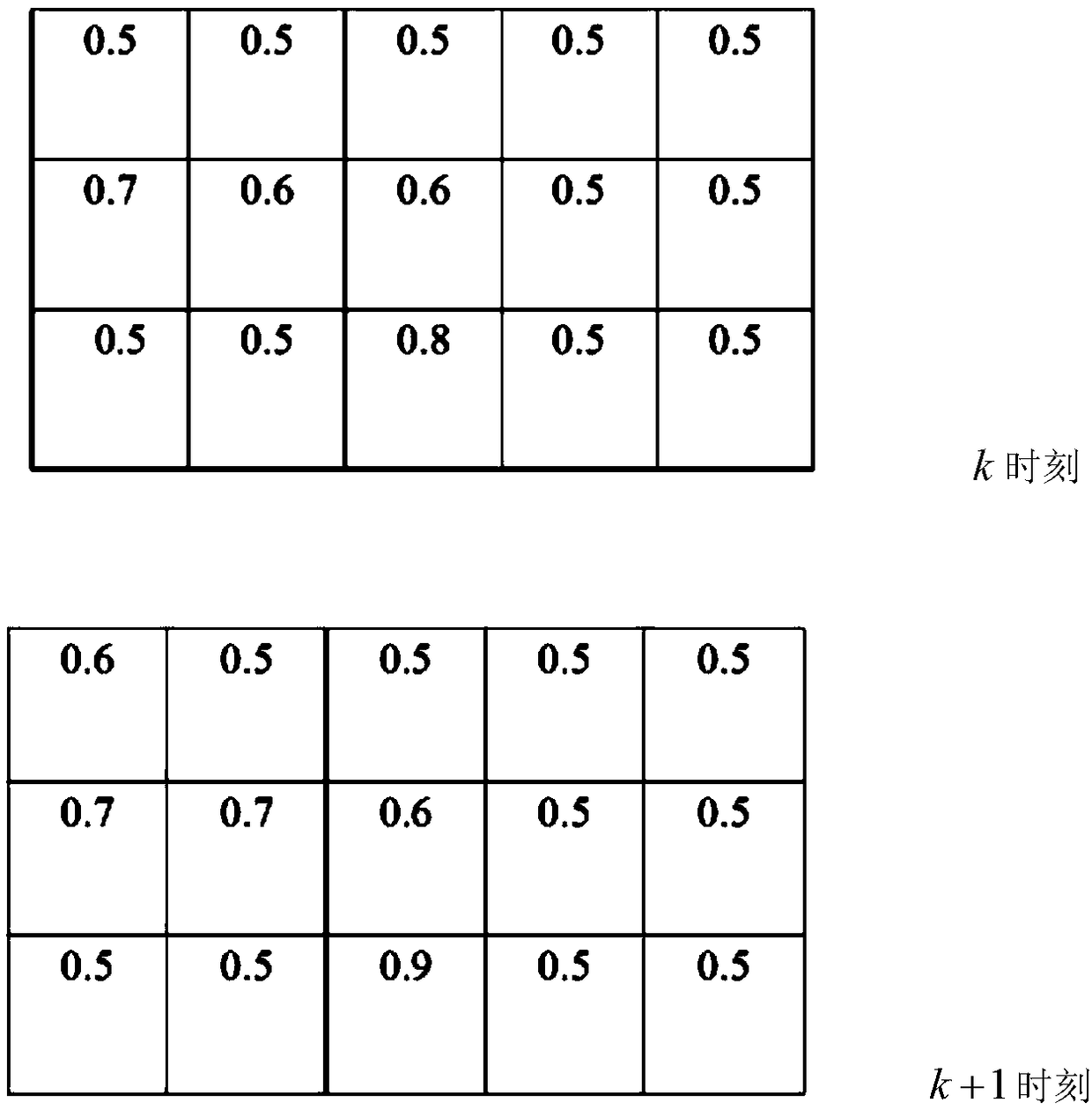
[0039] Step 2) Input the target image to be recognized, and perform gray-level thresholding processing on the image to obtain its two-dimensional digitized gray-scale image f(M,N), whose MN pixels are MN particles on the XOY plane, record The centroid coordinates (cx, cy) of the image, the gray value of each pixel point (x, y) is f(x, y) to represent the quality of the corresponding mass point; the target is measured by the normalized rotation vector (NMI) method Identification and tracking, the specific steps are as follows:
[0040] Step 2.1) Calculate the moment of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More