

Bistable-state flexible capture robot imitating dionaea muscipula leaf structure
A blade structure and bistable technology, applied in the field of robotics, can solve the problems of small flexibility, difficulty in capturing satellites with complex structures, slow response speed, etc., and achieve the effects of reducing impact, simple structure, and increasing reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
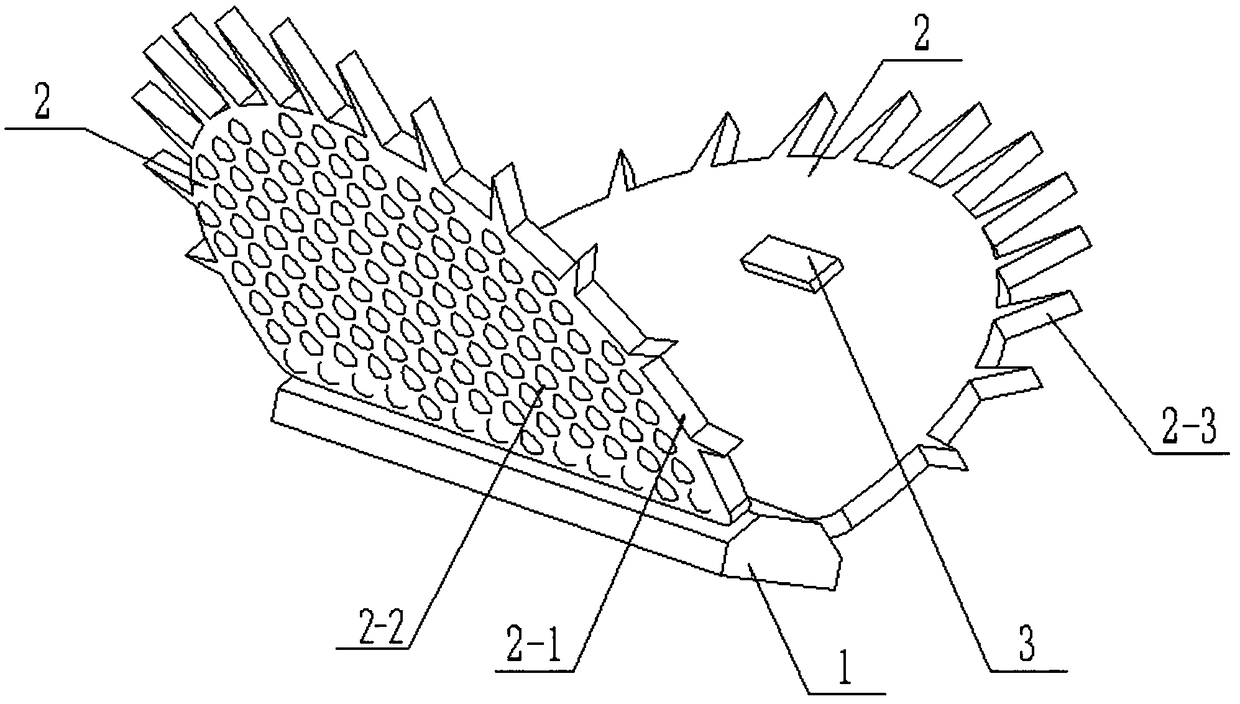
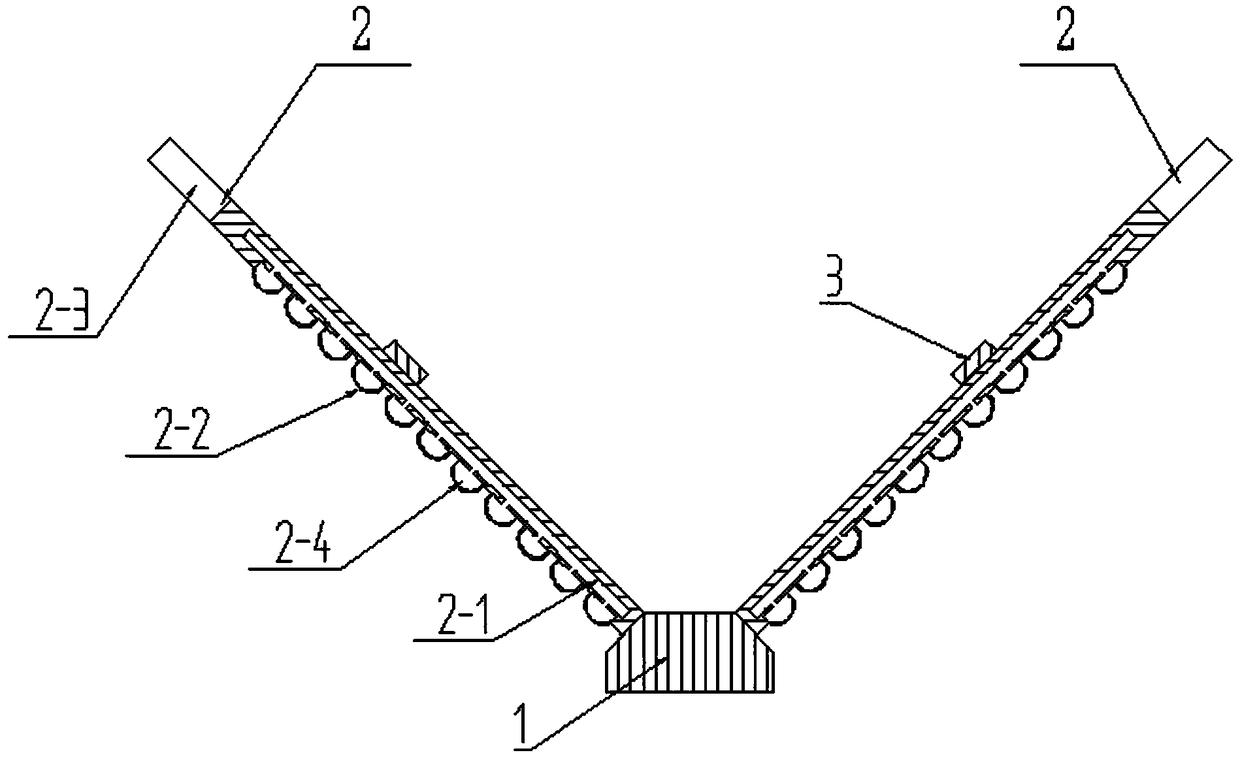
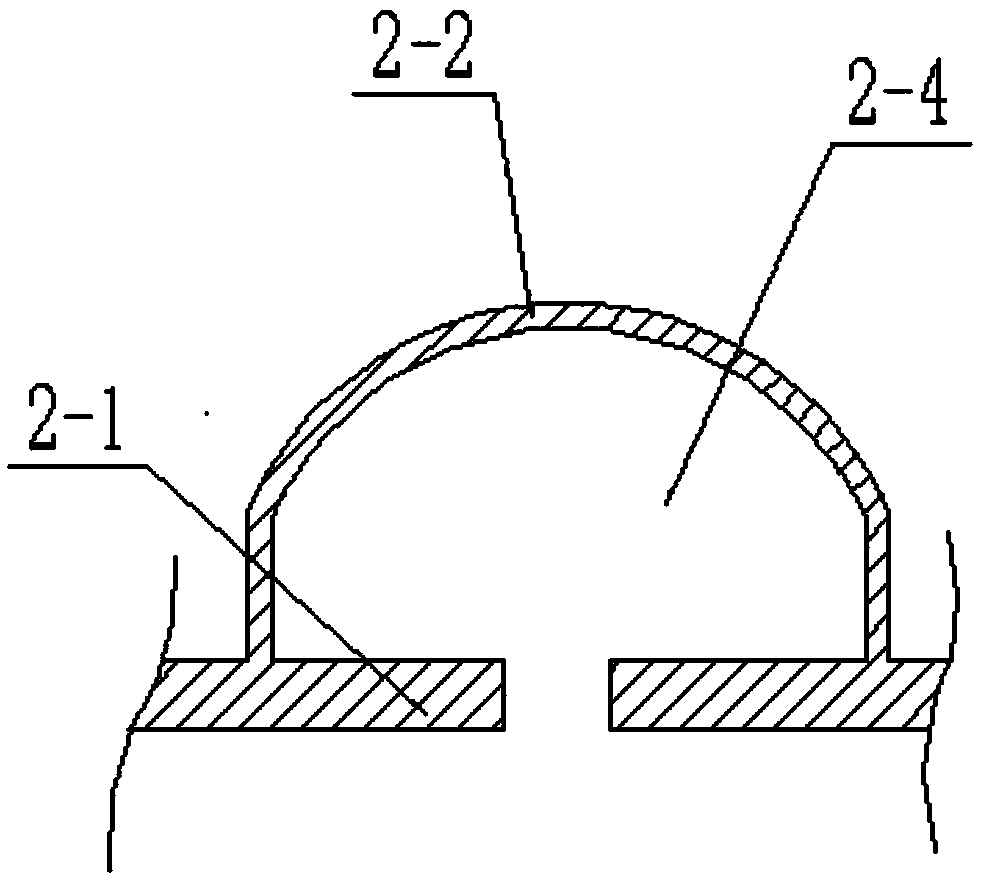
[0030] Such as Figure 1-6 As shown, a bistable flexible capture robot imitating the flytrap blade structure includes a base 1, a capture mechanism 2, a proximity sensor 3, a microcontroller 4, a liquid source 5 and a power supply 6, and the base The inside of 1 is arranged with a microcontroller 4, a liquid source 5 and a power supply 6; the power supply 6 supplies power to the microcontroller 4 and the liquid source 5; Simultaneously feed or extract liquid; the capture mechanism 2 is provided with two groups, and the two groups of capture mechanisms 2 are symmetrically fixedly connected to the left and right ends of the base 1; the liquid source 5 is connected to the two groups of capture mechanisms 2 ; The proximity sensor 3 is installed on two groups of capture mechanisms 2, and the proximity sensor 3 is electrically connected to the microcontroller 4. When the bistable flexible catching robot with imitation flytrap blade structure of the present invention is working, und...
specific Embodiment approach 2
[0031] Such as Figure 1-6 As shown, the capture mechanism 2 is integrally formed by a 3D printer. It is manufactured in one piece by a 3D printer, which saves materials, reduces costs, and has high precision.
specific Embodiment approach 3
[0032] Such as Figure 1-6 As shown, the catch mechanism 2 is made of polydimethylsiloxane. The arresting mechanism 2 is made of polydimethylsiloxane, which makes it more flexible, reduces impact, increases the reliability of arresting, and is easy to arrest various objects.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More