

Calculating method and system for relationship between robot position and planning path
A technology of planning path and calculation method, which is applied in the calculation method and system field of the relationship between robot position and planning path, and can solve the problems of inability to meet the high-precision requirements of robots, low calculation accuracy of recursive methods, and difficulty in meeting the real-time requirements of lower-position computer control robots, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
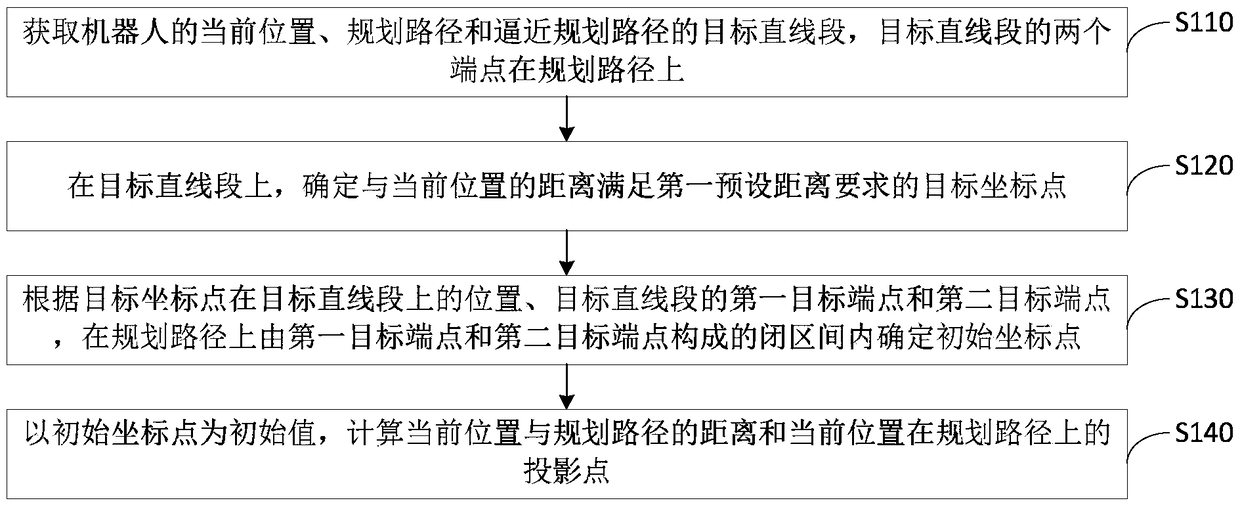
[0058] figure 2 It is a flowchart of a method for calculating the relationship between a robot’s position and a planned path provided by Embodiment 1 of the present invention. This embodiment is applicable to the calculation of the relationship between the robot’s current position and the planned path during the process of controlling the robot’s tracking. In this case, the method can be executed by a device for calculating the relationship between the robot position and the planned path, and the device can be STM32, which is used as a lower computer. The device may consist of hardware and / or software and be integrated in electronic equipment. Such as figure 2 As shown, it specifically includes the following steps:
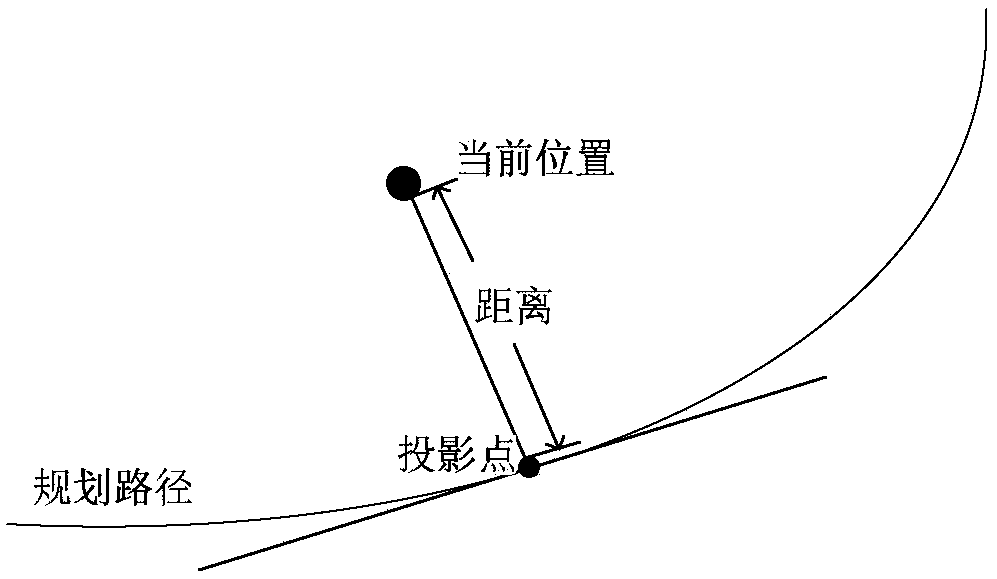
[0059] S110. Obtain the current position of the robot, the planned path, and a target straight segment approaching the planned path, where the two endpoints of the target straight line segment are on the planned path.
[0060] In this embodiment, the position...
Embodiment 2
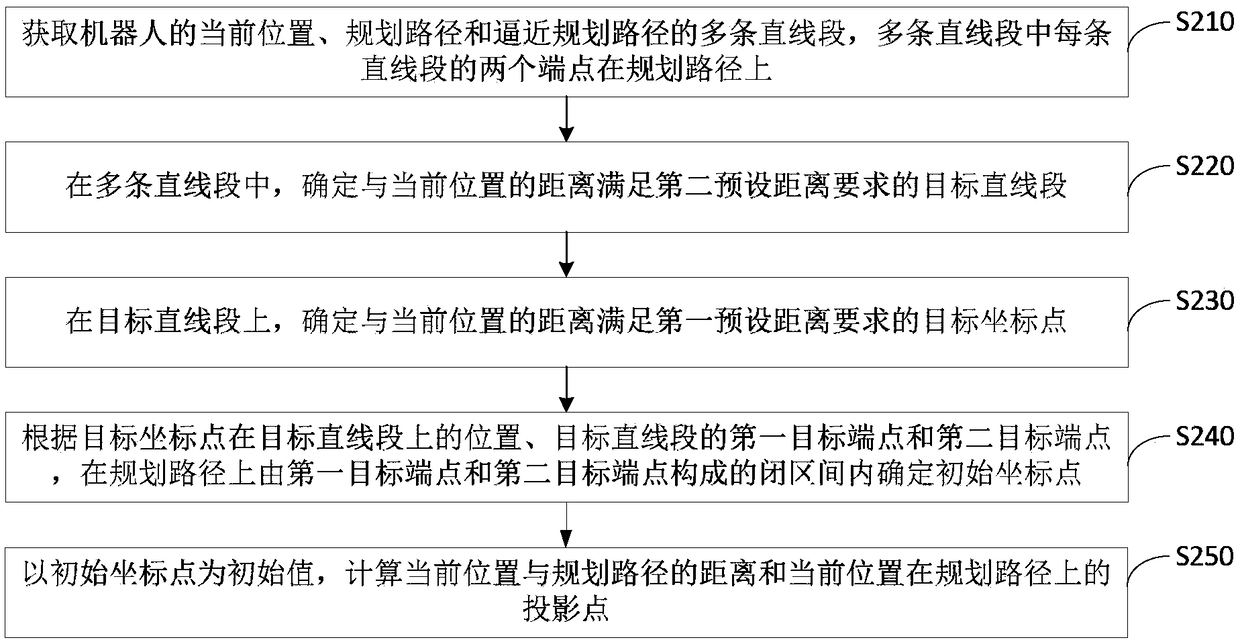
[0076] In the above embodiment, when there is only one straight line segment approaching the planned path, the straight line segment can be obtained directly. When there are multiple straight line segments approaching the planned path, the target straight line segment needs to be selected from the multiple straight line segments. This embodiment further optimizes the foregoing embodiment, and specifically defines the process of obtaining a target straight line segment from multiple straight line segments. Figure 3a It is a flowchart of a method for calculating the relationship between a robot position and a planned path provided in Embodiment 2 of the present invention, and specifically includes the following steps:
[0077] S210. Obtain the current position of the robot, the planned path, and multiple straight line segments approaching the planned path, where the two end points of each straight line segment in the multiple straight line segments are on the planned path.
[...
Embodiment 3
[0099] This embodiment further optimizes the foregoing embodiments, Figure 4a It is a flowchart of a method for calculating the relationship between a robot position and a planned path provided in Embodiment 3 of the present invention, and specifically includes the following steps:
[0100] S310. Obtain the current position of the robot, the planned path, and a target straight segment approaching the planned path, where the two end points of the target straight line segment are on the planned path.
[0101] S320. On the target straight line segment, determine a target coordinate point whose distance from the current position satisfies a first preset distance requirement.
[0102] S330. Calculate the target coordinate point and the first target endpoint u s The length L of the first line segment between s .
[0103] S340. Calculate the target coordinate point and the second target endpoint u e The length L of the second line segment between e .
[0104] S350, according t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More