

Mechanical arm wrist joint used under nuclear environment
A nuclear environment and mechanical technology, applied in the field of robotics, can solve problems such as difficult disassembly and maintenance, affecting transmission accuracy, and weak protection, so as to avoid collisions, ensure transmission accuracy, and eliminate transmission backlash
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
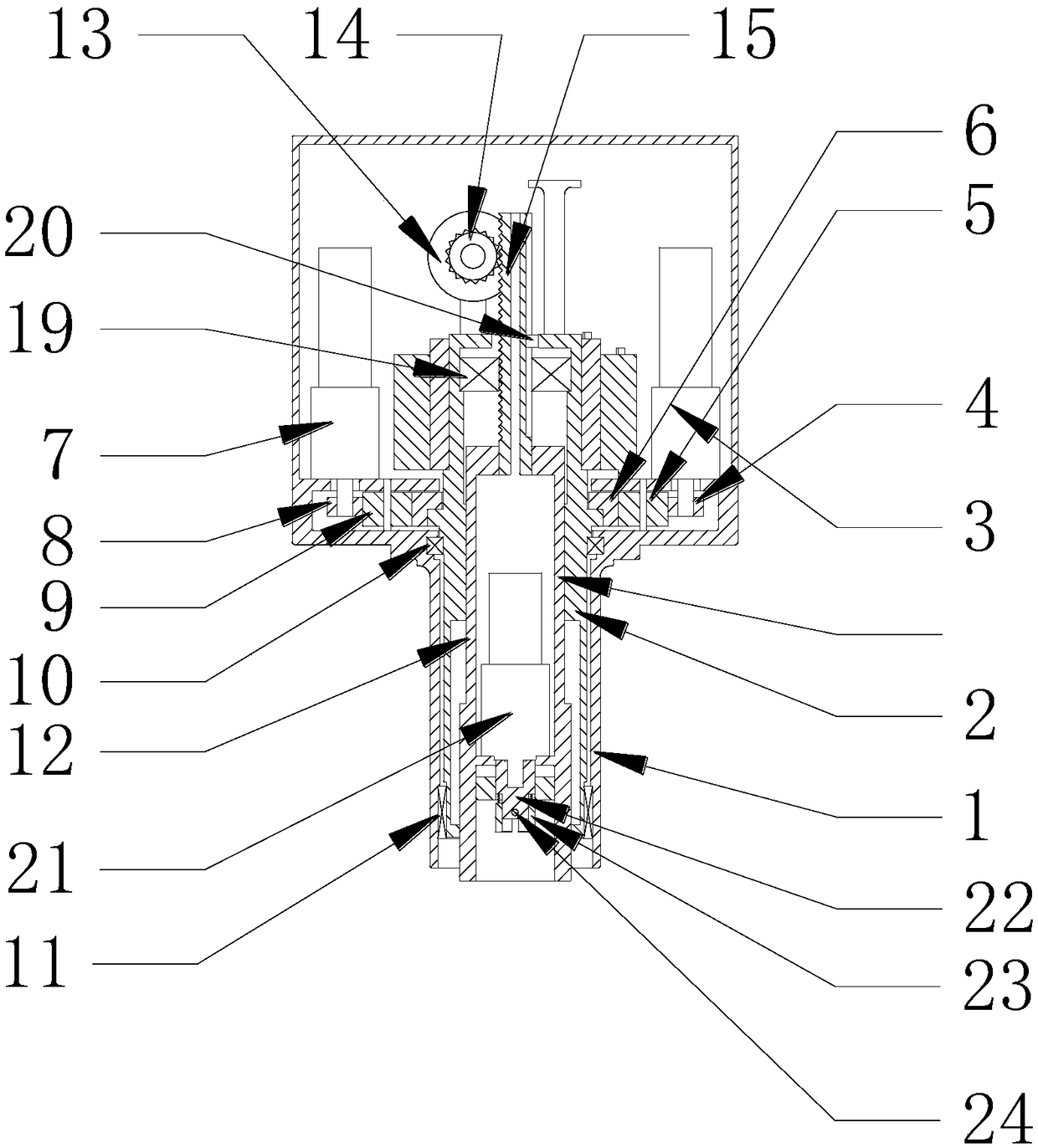
[0033] figure 1 It is a schematic diagram of the overall structure of the wrist joint of a robotic arm used in a nuclear environment according to the present invention.
[0034] In this example, if figure 1 As shown, a wrist joint of a manipulator used in a nuclear environment in the present invention mainly includes: a main structure 1, a revolving body 2 and a telescopic body 12;
[0035] The main structure 1 is installed with the rotary body 2, the rotary drive motor 3 and the counter torque motor 7, as well as the inlet flange 39 and the electric slip ring 29; the rotary body 2 is installed coaxially with the main structure 1, and the main The structure 1 is connected so that the rotary body 2 can perform rotary motion relative to the main structure 1; the rotary body 2 is connected with the output shaft of the rotary motor 3 through one or more stages of gear transmission, and is connected with the counter torque motor through one or more stages of gear transmission. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More