

Human-computer interaction control semi-physical simulation system and method for multi-modal unmanned aerial vehicle
A semi-physical simulation, machine-man-machine technology, applied in the field of drones, can solve problems such as unrealistic simulation, uncontrollable command correction, etc., to achieve the effect of improving reliability and avoiding false triggering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
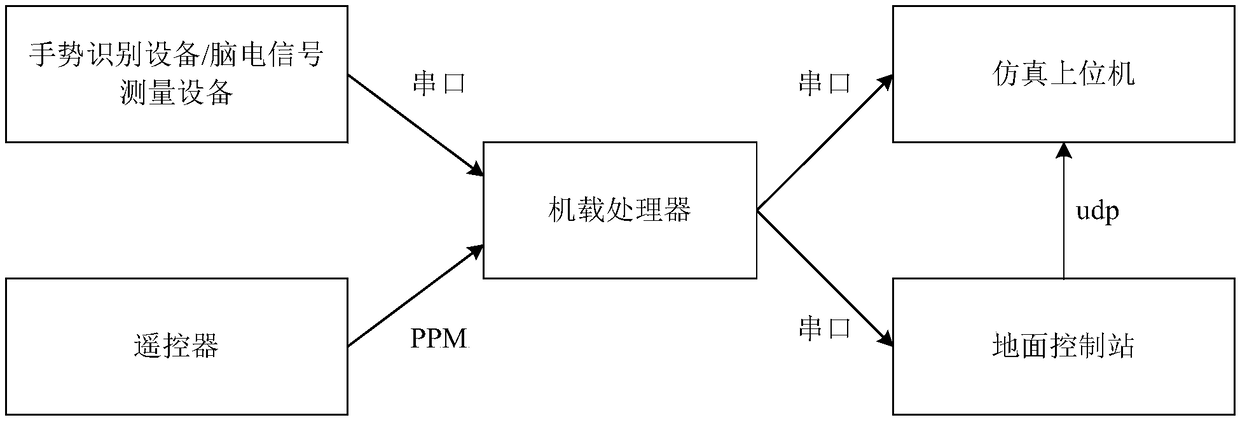
[0041] Example 1, such as figure 1 As shown, a semi-physical simulation system for multi-modal UAV human-computer interaction control, including: gesture recognition equipment, EEG signal measurement equipment, remote control, simulation host computer, ground control station and airborne processor, wherein, Gesture recognition equipment, EEG signal measurement equipment, and remote controllers enable multimodal control of drones.
[0042] The onboard processor is mounted on the UAV to receive control commands sent by gesture recognition equipment, EEG signal measurement equipment, and remote control receivers, as well as characteristic control commands issued by the ground control station, and follow the corresponding control commands or specific control commands. Command to control the UAV, and transmit the control command to the ground control station and the simulation host computer through the serial port communication module.
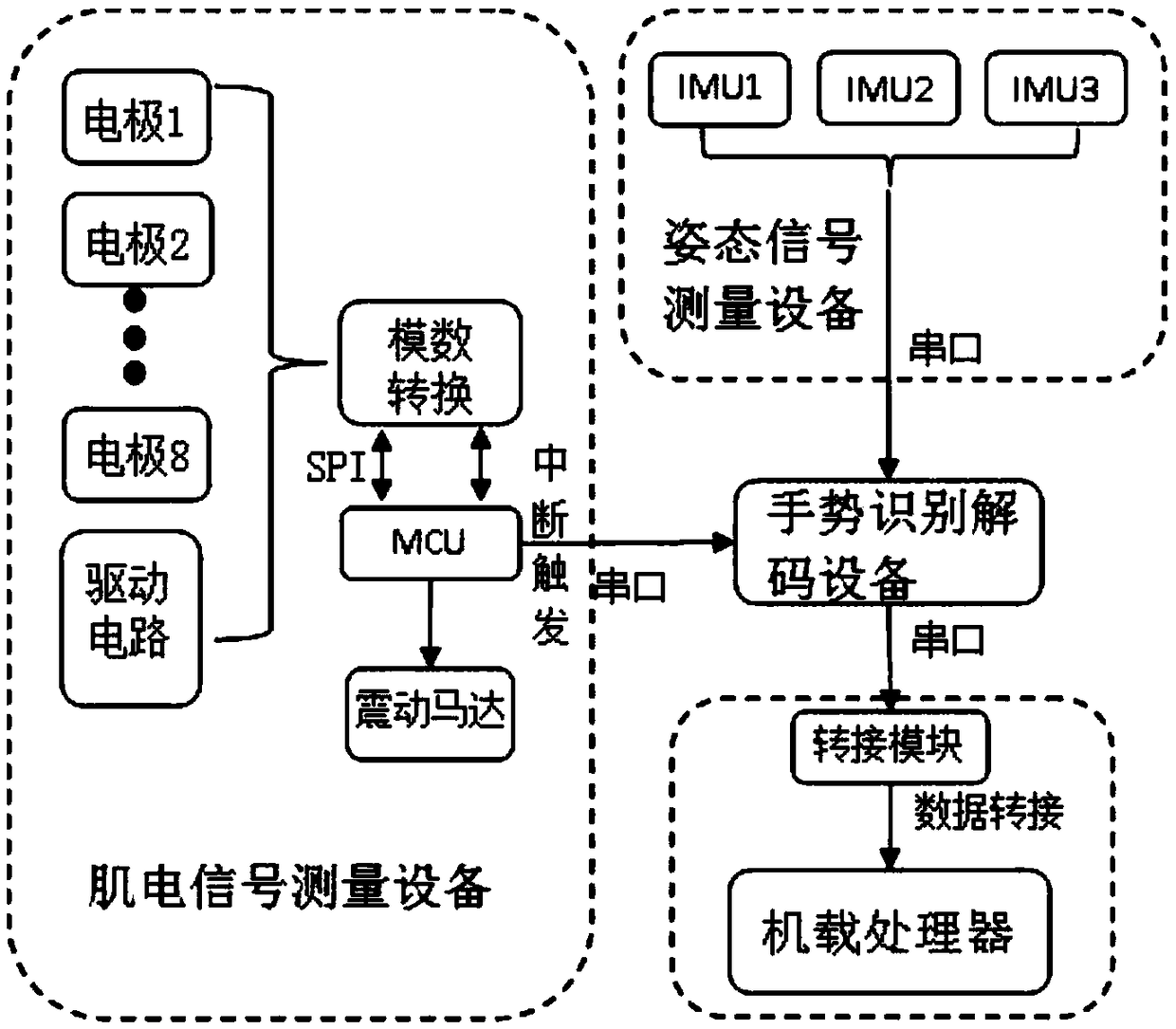
[0043] The gesture recognition device is co...
Embodiment 2
[0056] Embodiment 2, a kind of multi-mode unmanned aerial vehicle human-computer interaction control semi-physical simulation method, comprising:
[0057] Step 1. The gesture recognition device collects the operator's gesture signal, acquires the operator's gesture information, realizes the operator's gesture recognition, and converts the gesture information into a control command for the drone. The transfer module receives and processes the gesture recognition The control command protocol sent by the device is converted into a mavlink command recognizable by the onboard processor, and sent to the onboard processor through the serial communication module;
[0058] Step 2. The EEG signal measurement equipment collects the operator's EEG signal, obtains the operator's brain thinking information, and converts the brain thinking information into control instructions for the drone, and the transfer module receives and processes the EEG signal measurement equipment The sent control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More