

Vehicle-vehicle cooperative system and method based on V2X
A collaborative system and vehicle technology, applied in the field of V2X-based vehicle-vehicle collaborative systems, to achieve the effect of improving vehicle traffic efficiency and solving information interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
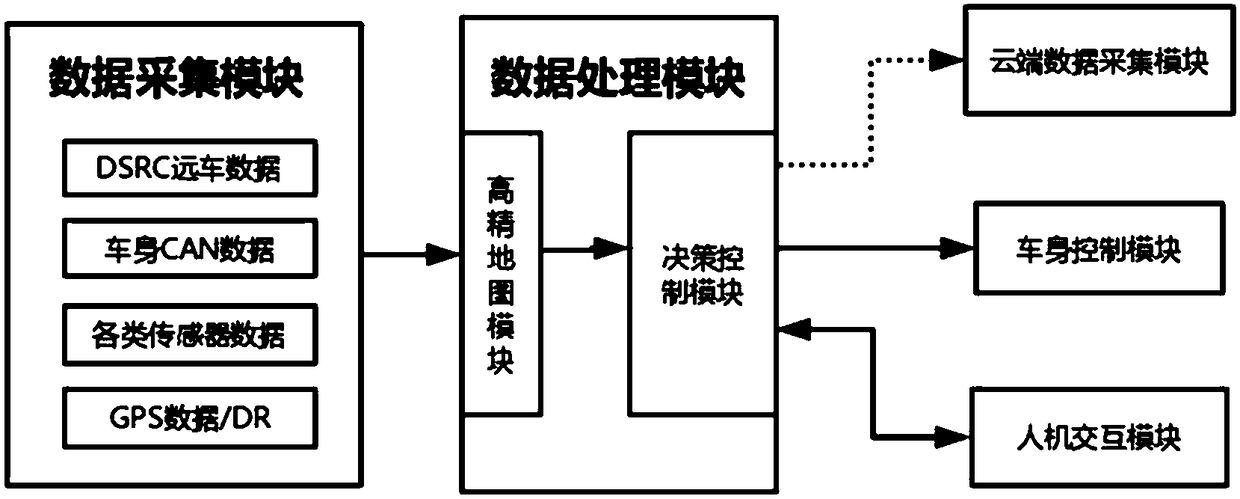
[0032] This embodiment provides a vehicle-to-vehicle coordination system based on V2X, such as figure 1 As shown, it includes a data processing module and a data acquisition module respectively connected to the data processing module, a cloud data acquisition module, a vehicle body control module, and a human-computer interaction HMI module, wherein:
[0033] 1.1 Data acquisition module
[0034] Because the present invention is directly aimed at actual usage, so the data acquisition module is divided into four aspects:
[0035] The first is remote vehicle data acquisition. This part is completed by a third party integrating the V2X protocol stack and the Internet of Vehicles hardware that meets IEEE802.11p or DSRC. Here, Cohda MK5 is used, and it can be received by parsing such equipment according to the established format. To the basic data of the remote car body, of course, the body data of this car can also be sent out by radio frequency through such equipment;
[0036] T...
example 1
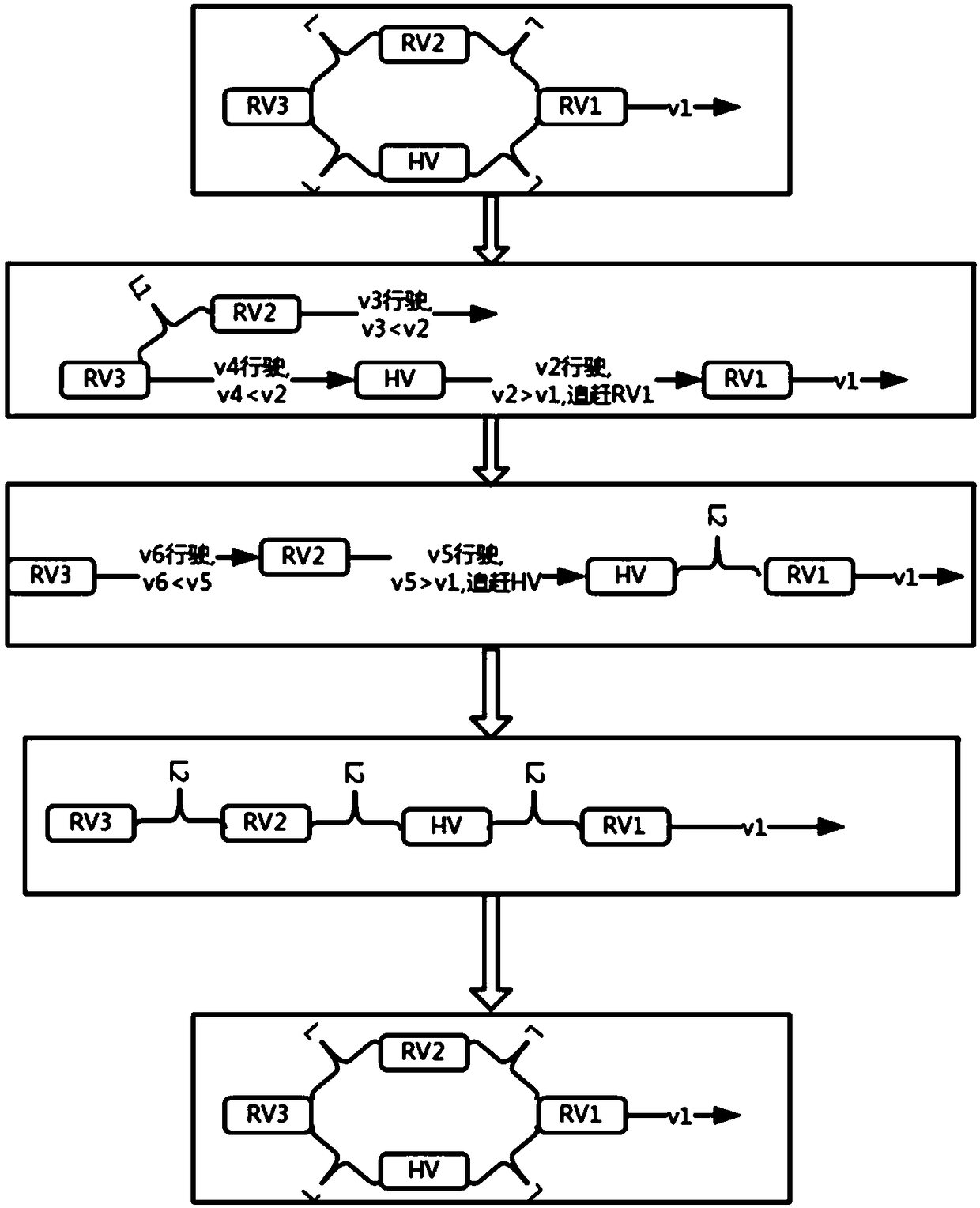
[0116] Scenario description: The convoy is driving on a road with three lanes on the planned route and encounters road construction ahead. The RSU broadcasts this situation. The on-board OBU detects the RSU broadcast message, and the convoy becomes a single-lane situation on a road section. image 3 as shown,
[0117] 1. The initial state is that all vehicles in the convoy travel at a constant speed of v1 according to the position in the picture;.
[0118] RV1 detects itself as the pilot vehicle and keeps driving in V1 without changing lanes;
[0119] 2. HV and RV2 detect that there is a situation ahead and must merge into the middle lane. In the scene where two vehicles entering the spaced lane merge into the same lane, HV decelerates to v2 to change lanes in advance, and RV2 decelerates with a greater deceleration v3, which affects subsequent follow-up Vehicles such as RV3, RV3 starts to follow RV2 with speed v4;
[0120] 3. After the HV successfully changes lanes, it aims...
example 2
[0124] Scenario description: The fleet is driving on a road with three lanes on the planned route. The control decision-making module will judge the positional relationship between the vehicle and the surrounding vehicles, and maximize the use of each lane through the "principle of high efficiency". The optimized As a result, the fleet that was originally about 5 times the length of the standard vehicle spacing was reduced to about 3.5 times the length of the vehicle standard spacing. If the length of the fleet is larger and the arrangement is more irregular, the benefits of optimization will be more obvious, which will greatly improve urban roads. and highway traffic efficiency, such as Figure 4 shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More