

Drone spraying planning method
An unmanned aerial vehicle, planning technology, applied in aircraft parts, devices for capturing or killing insects, launching devices, etc., can solve problems such as low work quality, excessive dependence on human factors, deviation from normal routes, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
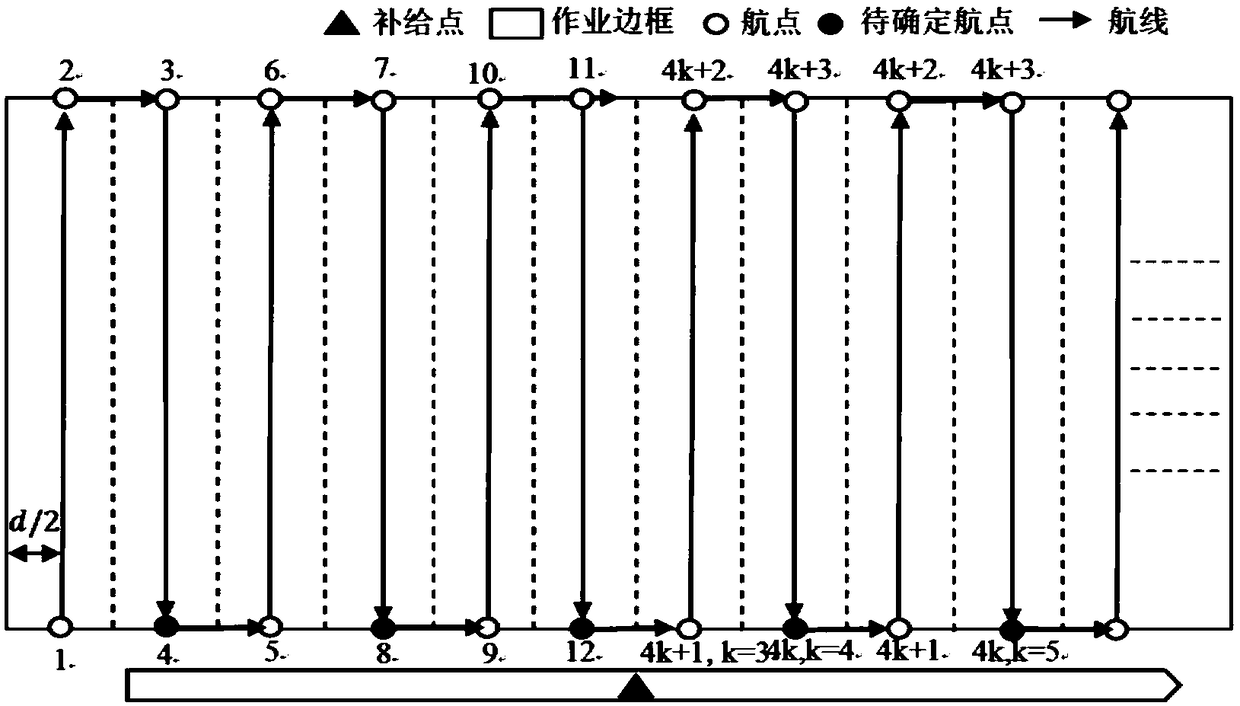
[0118] The difference between this embodiment and Embodiment 1 is that in the flight route planning, the supply point can supplement the load and power of the UAV, and its position and number are related to the width m of the operation area and the endurance time of the UAV. , the specific setting method of the supply point is: first set a supply point, its coordinates are: (m / 2,0), secondly, if the remaining power of the UAV from the first home point is less than the If the power is required, you need to add a supply point, continue to judge whether the remaining power of the UAV at the first home point is less than the required power to fly to the first supply point, if it is still less than, continue to add a supply point, and finally , and so on, assuming that b supply points are needed, the coordinate relationship of the supply points is: i b =bm / (b+1), i.e. i 1 =m / 2,i 2 =2m / 3....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More