

Multi-UAV task assignment method based on interval intuitionistic fuzzy information in uncertain environment
A fuzzy intuition and task allocation technology, applied in the direction of constraint-based CAD, resources, instruments, etc., can solve the problems of uncertain information sources, information loss, and no recognized sorting method, etc., and achieve high-resolution sorting results and simple calculations Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention is described in detail in combination with the accompanying drawings.
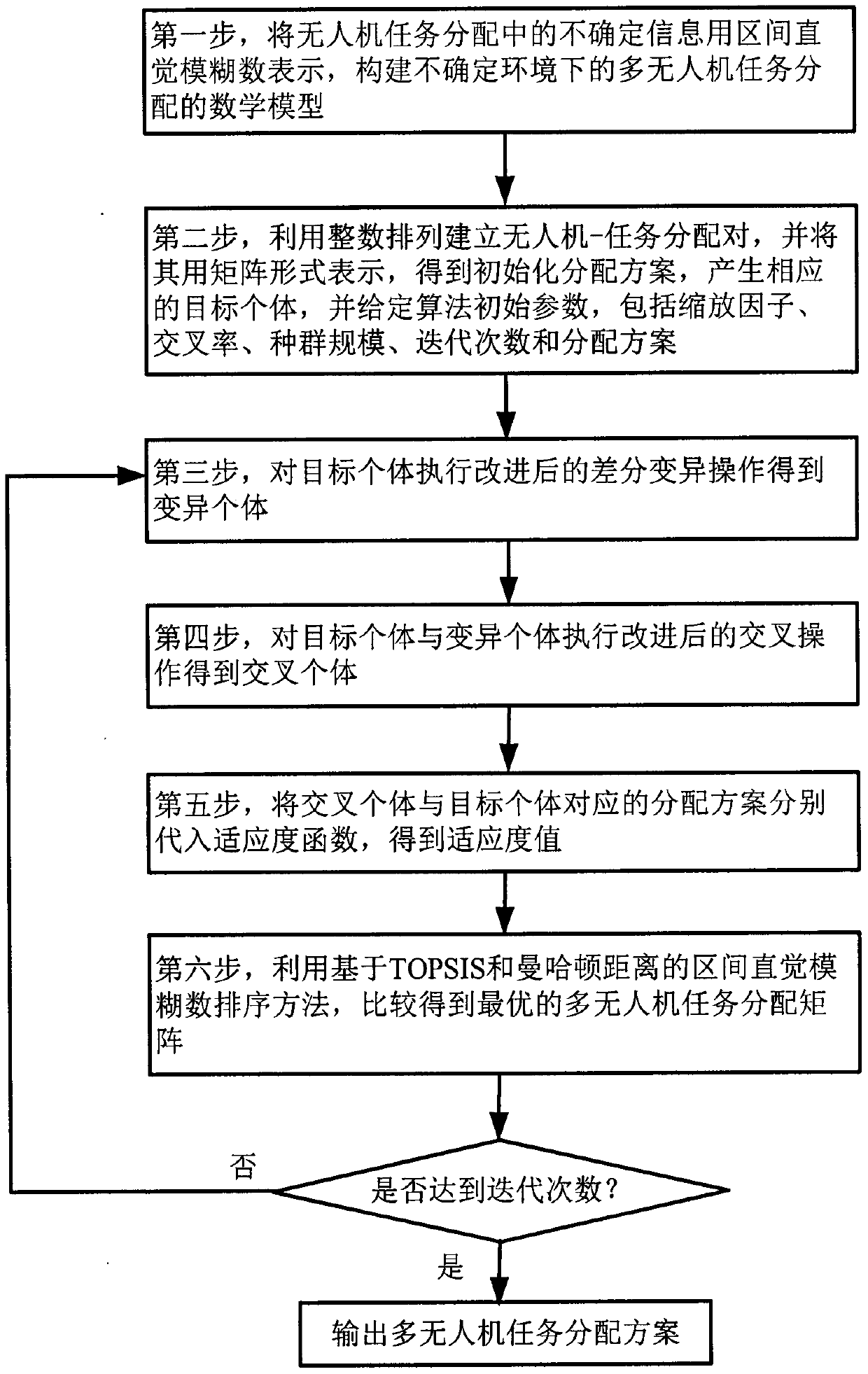
[0025] The multi-UAV task allocation method based on interval intuitional fuzzy information in an uncertain environment of the present invention specifically includes the following steps:
[0026] In step 1, the uncertain information in UAV task allocation is represented by interval intuitionistic fuzzy numbers, and a mathematical model for multi-UAV task allocation in an uncertain environment is constructed.
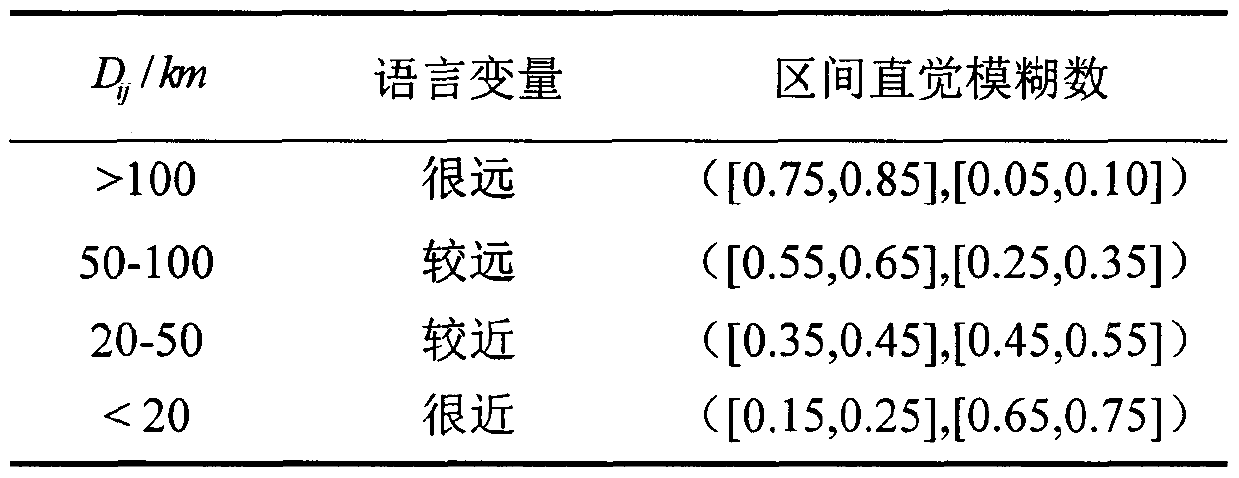
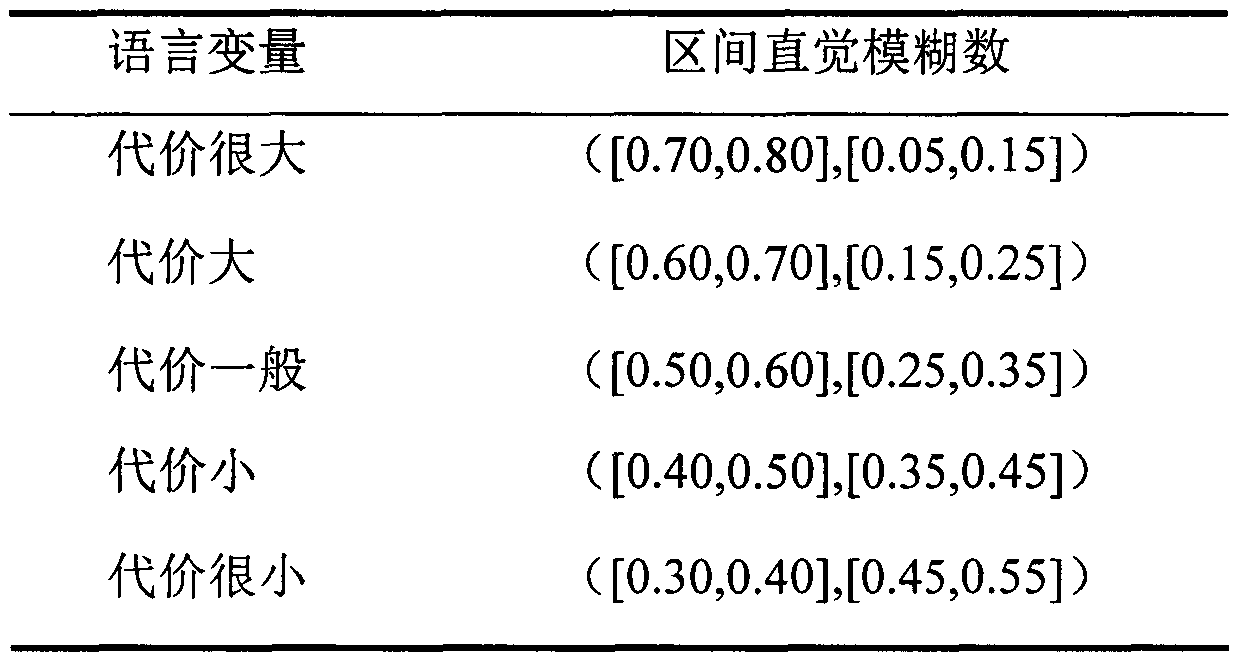
[0027] First, the uncertain information in multi-UAV task assignment is represented by interval intuitionistic fuzzy numbers, specifically:
[0028] (1) Threat cost C 1 The interval intuitionistic fuzzy value of
[0029] First, using C 1 =PK ij ·V i Calculate the threat cost value C when a single UAV i executes mission j 1 , here PK ij Probability of being destroyed when UAV i executes mission j, V i for UCAV i the value of ; then use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More