

Rotary fully-flexible mechanical arm
A flexible manipulator, manipulator technology, applied in manipulators, program-controlled manipulators, claw arms, etc., to achieve the effect of broad application prospects and improved flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
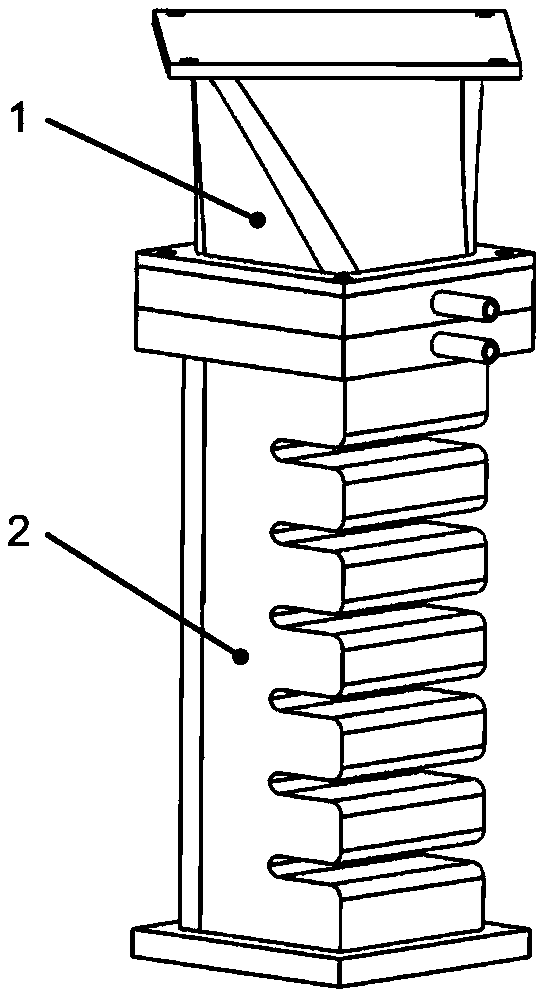
[0027] The joint silicone tube 8 of the present invention is connected to negative pressure, and the side curved surface 11 positively twists to drive the flexible joint 1 to rotate, and the lower bottom surface of the joint connection module 9 of the flexible joint 1 and the upper bottom surface 4 of the mechanical arm connection module 4 of the flexible mechanical arm 2 move synchronously , to drive the flexible manipulator 2 to rotate, and then bend to different directions by controlling the flexible manipulator 2 to receive positive pressure and negative pressure. The combination of the flexible joint 1 and the flexible manipulator 2 makes the motion of the flexible manipulator 2 change from a planar two-dimensional motion to a three-dimensional motion in space, which improves the range of motion and flexibility of the manipulator.
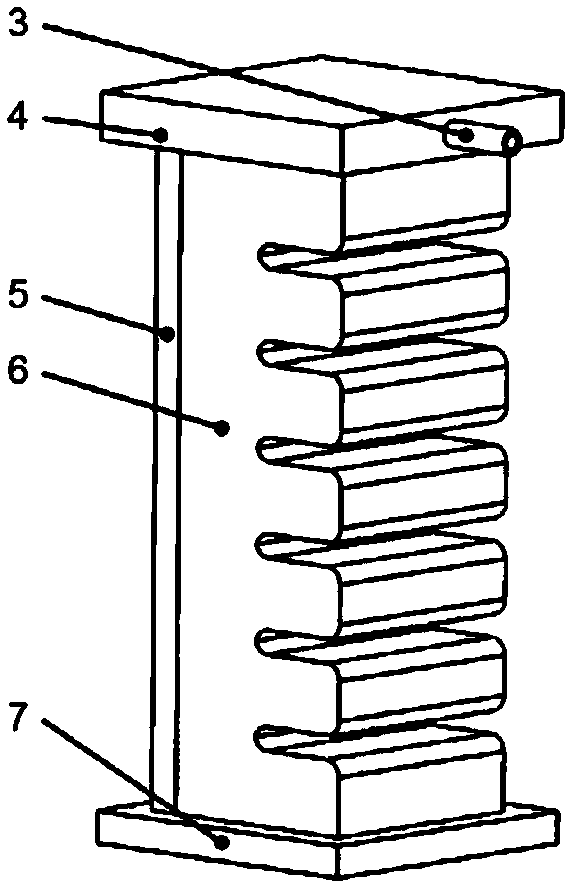
[0028] Such as Figure 5 As shown, after the silicone tube 3 of the manipulator is connected to the positive pressure, the main body 6 of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More