Amphibious unmanned aerial vehicle structure
An amphibious, unmanned aerial vehicle technology, applied in the direction of unmanned aircraft, motor vehicles, aircraft, etc., can solve the limitation of the flexibility, reliability and versatility of UAV equipment, and can not effectively solve the problem of UAV water surface Problems affecting the reliability of UAV take-off and landing operations, etc., to achieve the effect of improving flexibility and reliability, simple structure, flexible and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
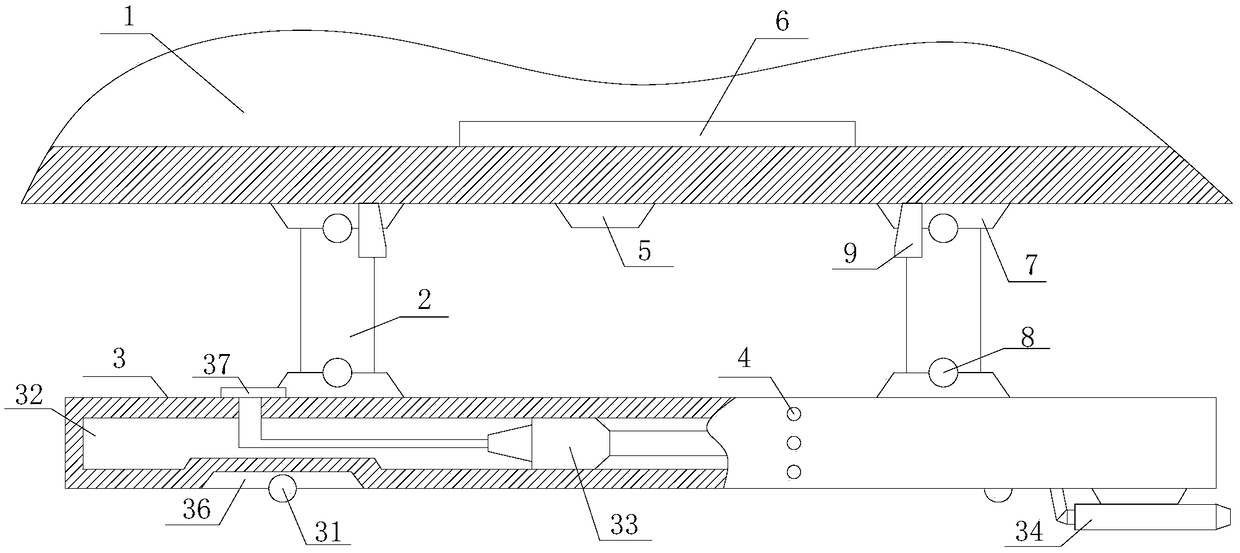
[0015] Such as figure 1 The structure of an amphibious unmanned aerial vehicle includes a fuselage 1, a bearing column 2, a landing gear 3, a liquid level sensor 4, a ranging device 5 and a landing adaptation control system 6, wherein there are at least two landing gears 3, The bearing column 2 is connected to the lower surface of the fuselage 1, the axis of the landing gear 3 and the axis of the fuselage 1 form an angle of 0°-60°, and each landing gear 3 is connected to the fuselage through at least one bearing column 2, The two ends of the bearing column 2 are respectively hinged with the fuselage 1 and the landing gear 3 through the turntable mechanism 7. The axis of the bearing column 2 intersects with the axes of the fuselage 1 and the landin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More