

Virtual stereoscopic vision-based non-cooperative target cooperative measuring method and system
A non-cooperative target and measurement method technology, applied in the field of non-cooperative target-based collaborative measurement methods and systems, can solve problems such as difficulty in meeting the real-time requirements of spatial visual measurement, large amount of image data, and unfavorable spatial robot visual measurement, etc. Reduced cost, high computational efficiency, reduced number of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
[0037] The invention provides a non-cooperative target cooperative measurement method based on virtual stereo vision, comprising the following steps:
[0038] Obtain the 3D point cloud image of the non-cooperative tumbling target;
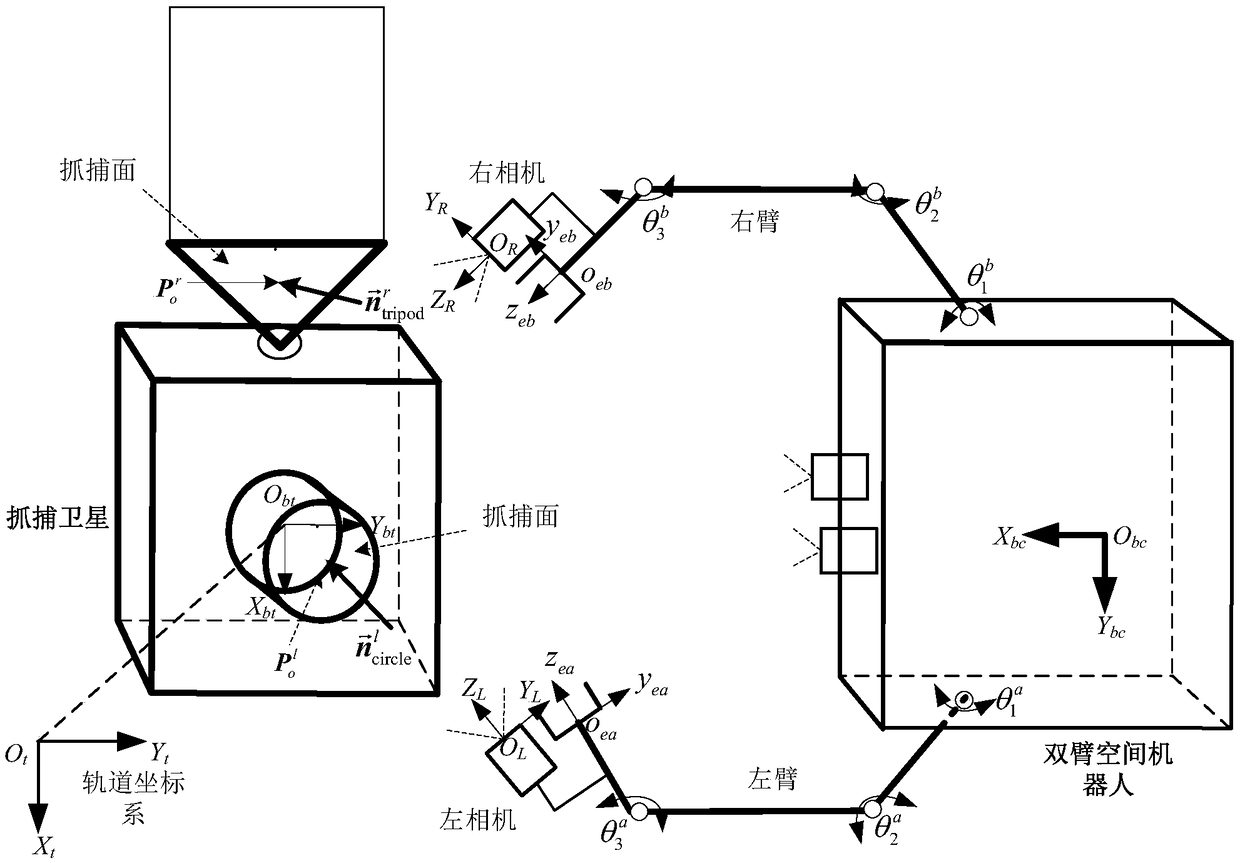
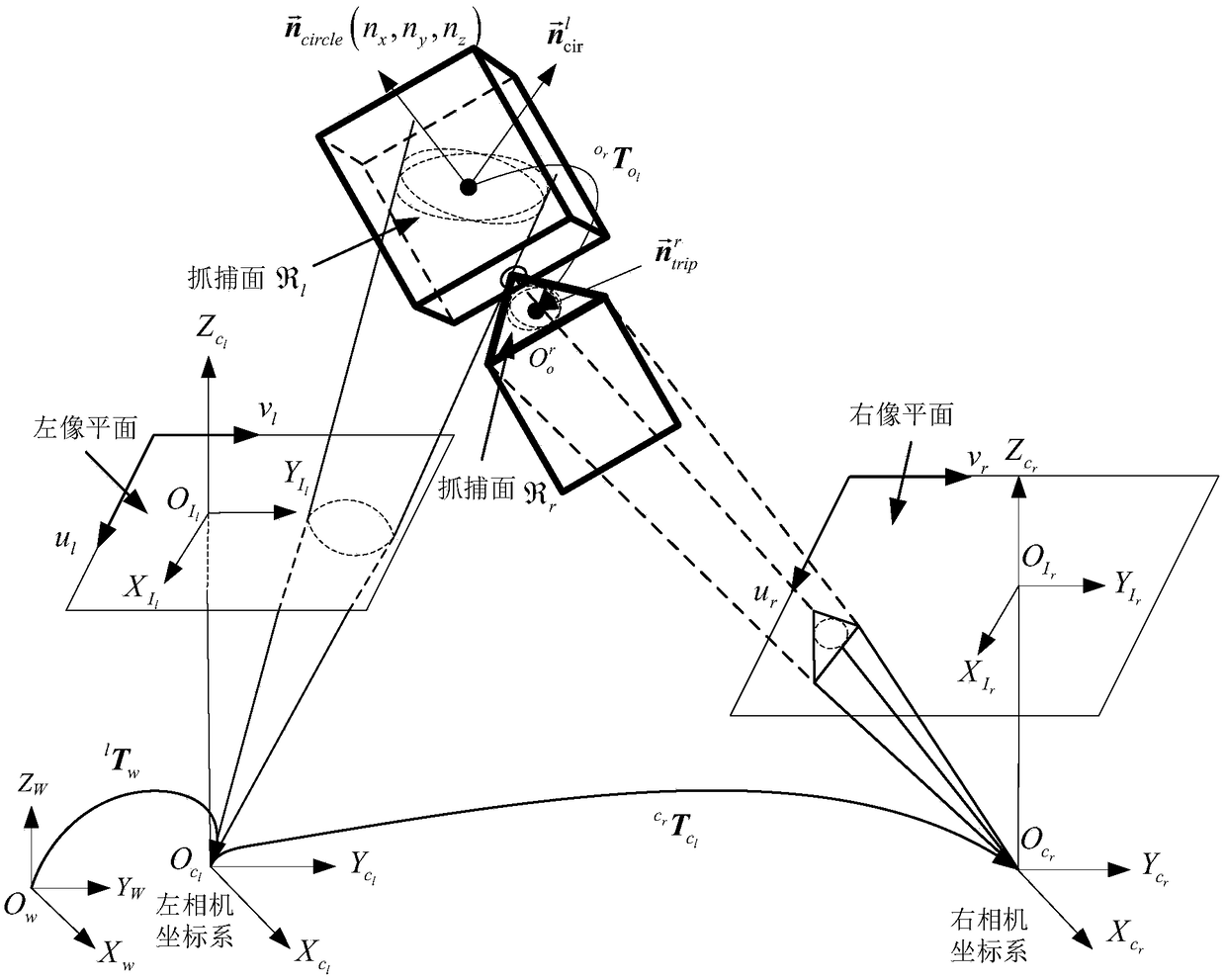
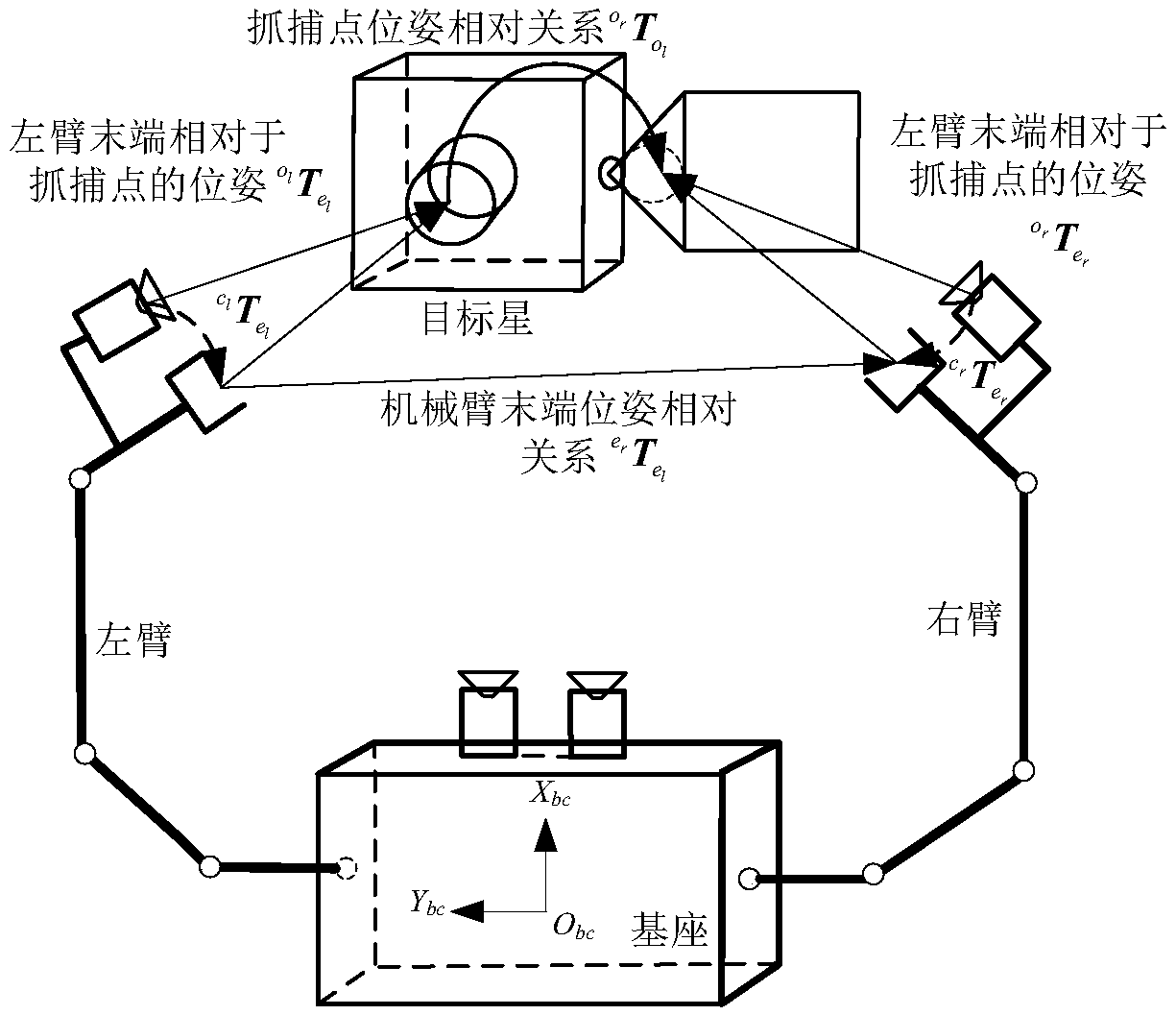
[0039] Extracting the relative pose relationship between the nozzle center of the satellite in the three-dimensional point cloud image and the center of the inscribed circle of the triangular support;
[0040] Perform image preprocessing operations on the acquired images of satellite nozzles and tripods;
[0041] The images of the satellite nozzle and the tripod are respectively processed, and the pose relationship in a specific coordinate system is obtained through coordinate transformation;
[0042] The radius of the inscribed circle between the satellite nozzle and the tri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More