

System state prediction device and method based on Kalman filter
A Kalman filter and system state technology, which is applied in the engineering field, can solve the problem that the Kalman filter cannot accurately track targets, and achieve the effect of accurate prediction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] It should be noted that, in the case of no conflict, the embodiments in the present disclosure and the features in the embodiments can be combined with each other.
[0046] Before describing in detail the Kalman filter-based system state prediction device and method according to the embodiments of the present disclosure, a basic model of the Kalman filter is briefly introduced first.
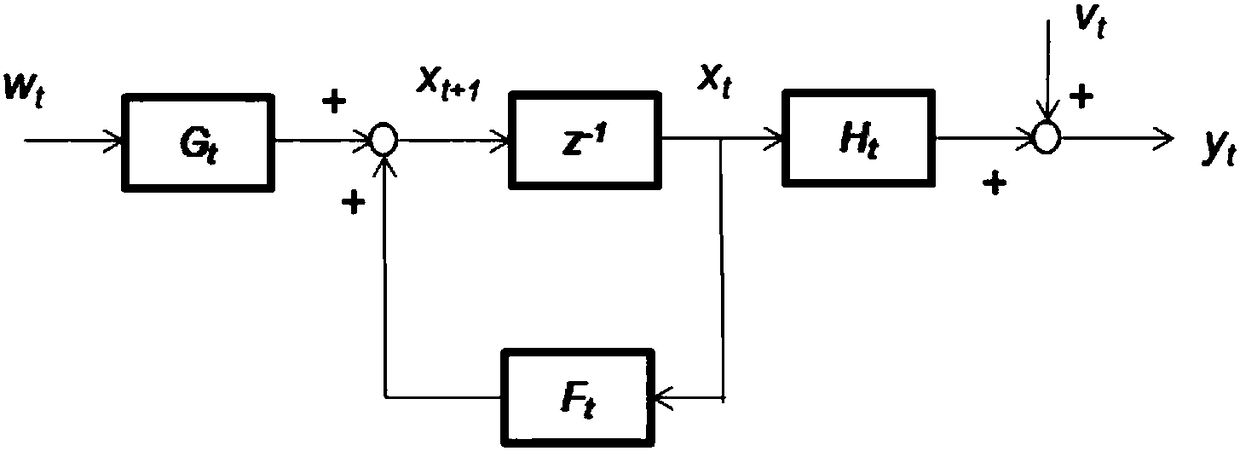
[0047] The basic model of the Kalman filter is as figure 1 shown. Among them, the basic equation of the Kalman filter can be expressed as:
[0048]
[0049]
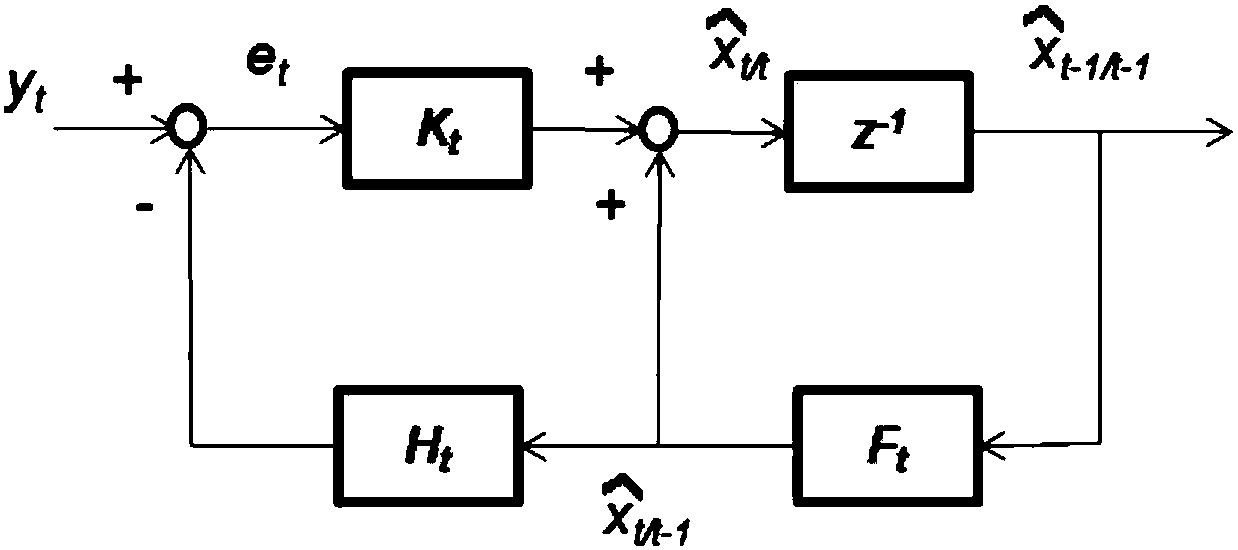
[0050] in, Indicates the prior state estimate at time t+1 obtained from the measured values from time 1 to time t, F t represents a linear model for time transformation, Denotes the posterior state estimate at time t estimated from the prior state estimate at time t and the measured value at time t, Denotes the prior state estimation value at time t obtained from the measured values from time 1 to time t-1, K t repr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More