Constraining force robust servo control method and device for under-actuated flexible mechanical arm system
A flexible robotic arm and servo control technology, applied in the field of servo control, can solve problems such as difficult to accurately describe the binding force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0101] A constraint robust servo control method for an underactuated flexible manipulator system, comprising the following steps:
[0102] Step (1), provide the dynamic equation of the underactuated flexible manipulator system with constraints:
[0103]
[0104] Wherein, M represents the inertia matrix of the mechanical arm of the underactuated flexible mechanical arm system, C represents the centrifugal force of the mechanical arm, G represents the gravity of the mechanical arm, K represents the elastic coefficient of the mechanical arm, and q 1 Represents the link angle vector of the manipulator; q 2 represents the joint angle vector of the manipulator, for q 1 The first-order derivative of , for q 1 The second-order derivative of , J represents the diagonal matrix of the actuator inertia of the manipulator; u represents the input force of the motor of the manipulator, for q 2 The second-order derivation of ;
[0105] Step (2), introduce dummy control variable u...
Embodiment 2
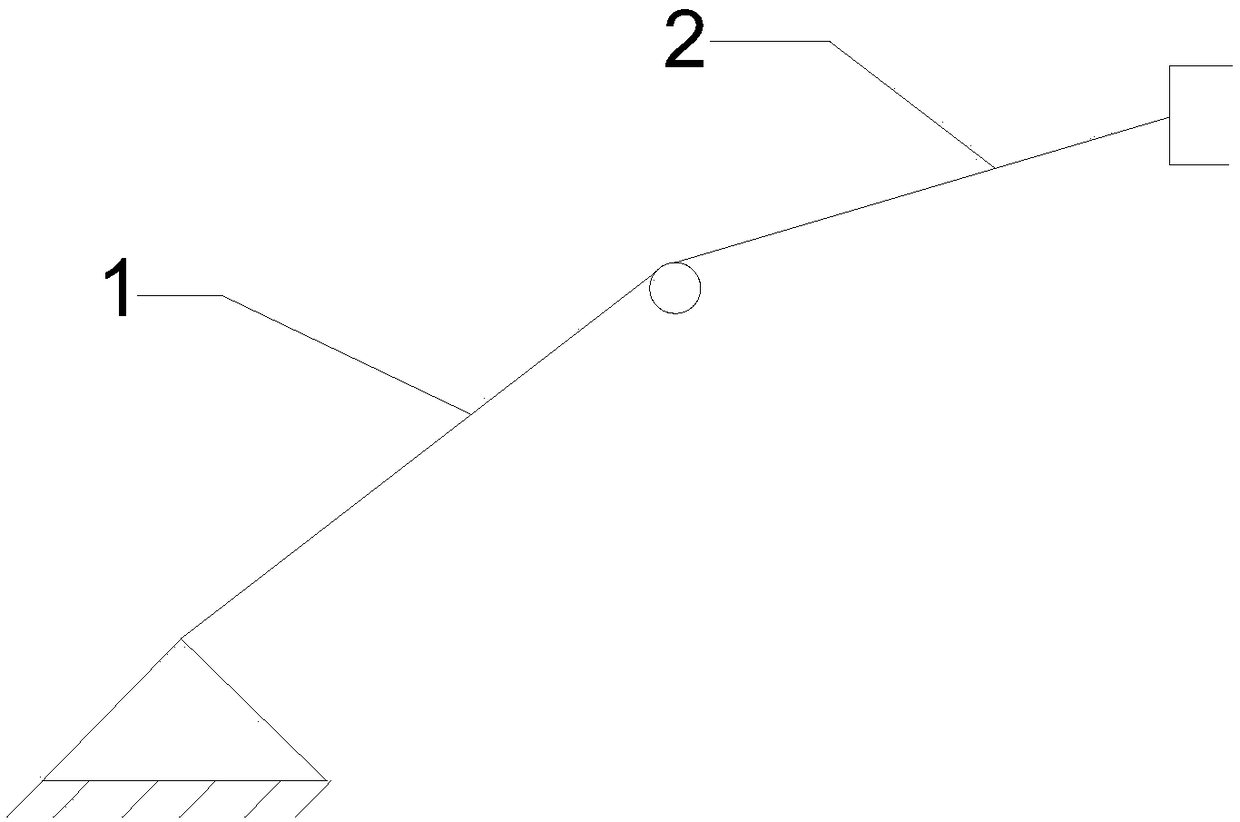
[0145] Depending on the given mechanical system:
[0146]
[0147] M represents the inertia matrix of the mechanical arm of the underactuated flexible mechanical arm system, C represents the centrifugal force of the mechanical arm, g represents the gravity of the mechanical arm, K represents the elastic coefficient of the mechanical arm, and q 1 Represents the link angle vector of the manipulator; q 2 represents the joint angle vector of the manipulator, for q 1 The first-order derivative of , for q 1 The second order derivation of, J represents the diagonal matrix of the actuator inertia of described mechanical arm; U represents the input force of the motor of described mechanical arm, for q 2 The second-order derivative of .
[0148] Constraints on the system are of the following form:
[0149]
[0150] yes The i-th element of .A li ( ) and c l ( ) belong to C 1 ,m≤n. They are first-order form constraints. These constraints may not be integrable and ...
Embodiment 3
[0255] This embodiment provides a constraint robust servo control device for an underactuated flexible manipulator system corresponding to Embodiment 1. The binding force robust servo control device includes a calculation module 1, a calculation module 2, a calculation module 3, a selection module 1, and a selection module 2.
[0256] Calculation module one is used to select a P for a given A, and for Calculate lambda A , where A represents the constraint condition matrix of the underactuated flexible manipulator system, the dimension is m×n, P is an arbitrary n×n positive definite matrix, λ A is the intermediate parameter of the design process, M represents the inertia matrix of the manipulator of the underactuated flexible manipulator system, and K represents the elastic coefficient of the manipulator.
[0257] Calculation module two is used for choose| 1 , get p according to formula (4.5) and formula (4.6) 11 ,p 12 , where γ 1 for the corresponding p 12 The posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More