Adaptive 3D measuring device and information acquiring device
A technology of acquisition device and measurement device, which is applied in the direction of measurement device, optical device, image communication, etc., can solve the problems that 3D images cannot be synthesized, the accuracy is difficult to use for measurement, and it is difficult to focus accurately, so as to improve the effect and stabilize the composite image performance, prevent collection speed from slowing down, and guarantee effects and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
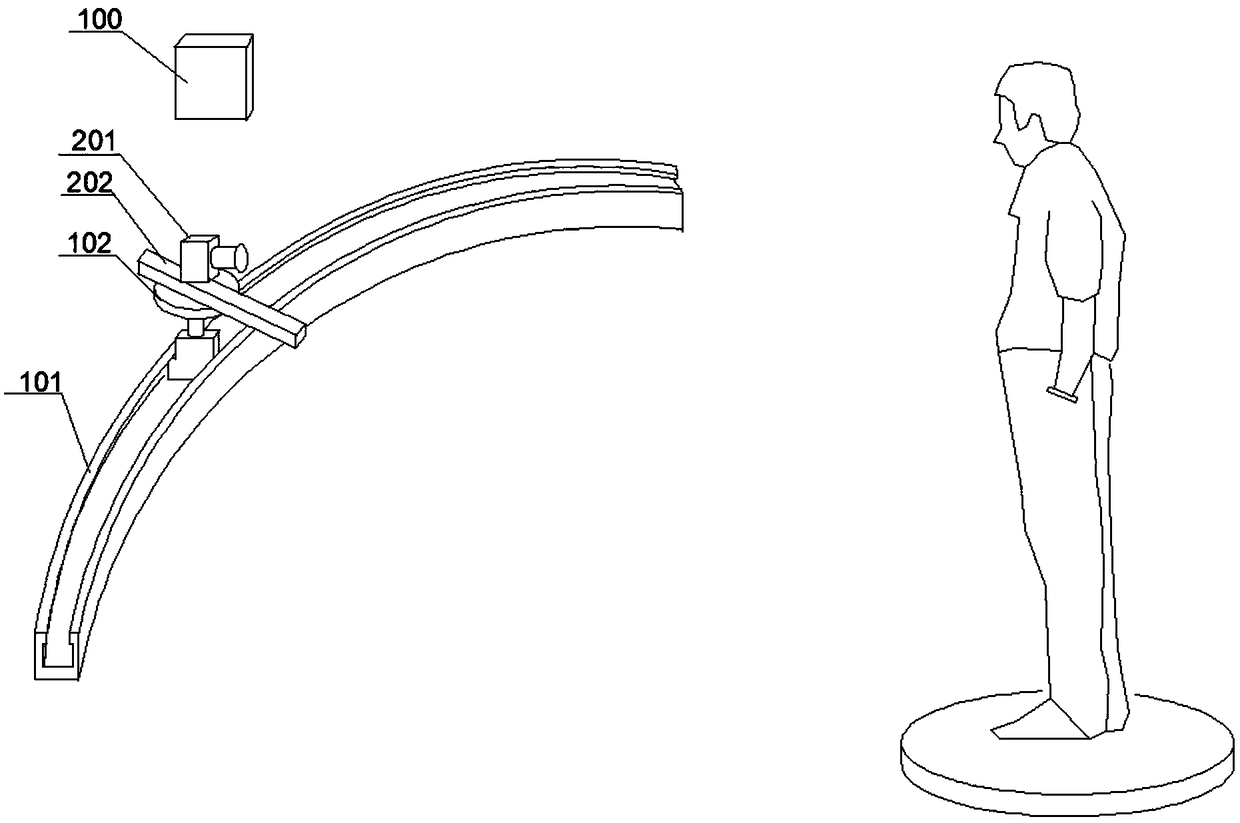
[0041] In order to solve the above technical problems, an embodiment of the present invention provides an adaptive 3D information acquisition / measurement device. Such as figure 1 As shown, it specifically includes: a rail 101 , an image acquisition device 201 , a processing unit 100 , a rotation device 102 , and a displacement device 202 .
[0042] The image acquisition device 201 is installed on the displacement device 202, and the displacement device 202 is installed on the rotation device 102. The rotation device 102 can move along the track 101, thereby driving the image acquisition device 201 to rotate around the target object.
[0043] The image acquisition device 201 can be a camera, a video camera, a CCD, or a CMOS, and it can be equipped with various lenses as required, such as an infrared lens, a visible light lens, a telephoto lens, a wide-angle lens, a macro lens, and the like.
[0044] Taking the image acquisition device as a camera as an example:
[0045] Sinc...
Embodiment 2
[0053] In order to solve the above technical problem, an embodiment of the present invention provides an adaptive 3D information acquisition device. It specifically includes: a track 101 , an image acquisition device 201 , a processing unit 100 , and a rotating device 102 . Since the object distance between the image acquisition device 201 and the target object varies in different regions during the rotation process, it may be difficult to focus accurately during the rotation process. In addition to using the method of adaptively changing the object distance in Embodiment 1, the focal length of the image acquisition device 201 can also be adjusted so that accurate focusing can be achieved under the new object distance.
[0054] When at a certain position A1, the distance measuring device 203 measures the distance between the image acquisition device 201 and a target area to be H1, and the focal length of the lens is F1 at this time; when the image acquisition device 201 is loc...
Embodiment 3
[0060] Although there are unevenness in different areas of the target, the degree of unevenness is low. If the method of Embodiment 1 or 2 is adopted at this time, the time for adaptive adjustment will be longer, which is not conducive to rapid acquisition and measurement. During the rotation process, the distance measuring device 203 measures the distance (object distance) h(x) from the camera 201 to the object in real time, and sends the measurement result to the processing unit 100, and the processing unit 100 searches the object distance-focal distance table to find the corresponding focal length value, send a focusing signal to the camera 201, and control the ultrasonic motor of the camera to drive the lens to move for fast focusing. In this way, fast focusing can be achieved without adjusting the position of the image acquisition device 201 or adjusting the focal length of its lens to ensure that the pictures taken by the image acquisition device 201 are clear. This is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More